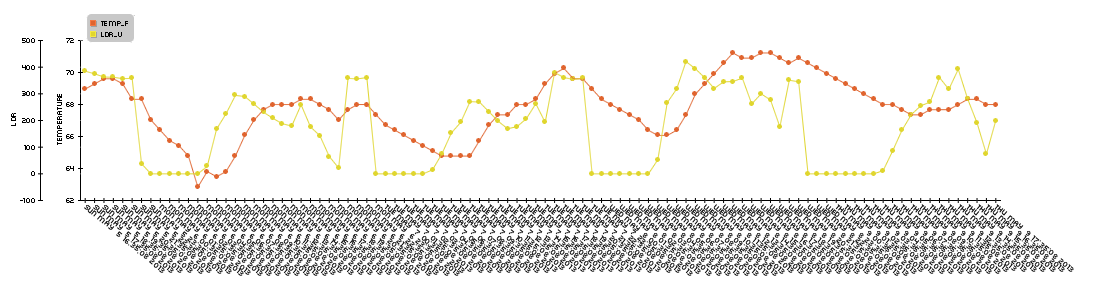
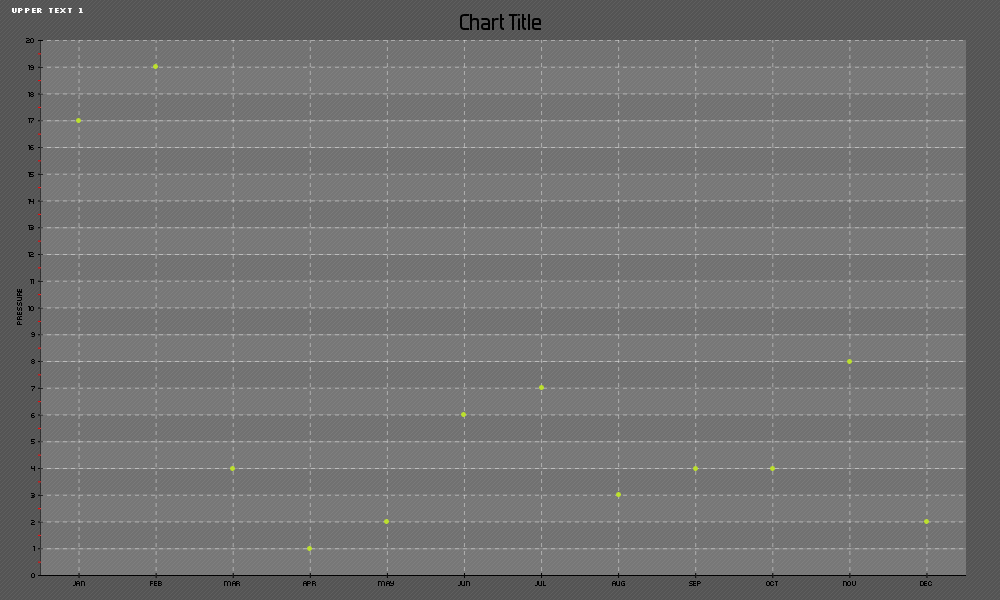
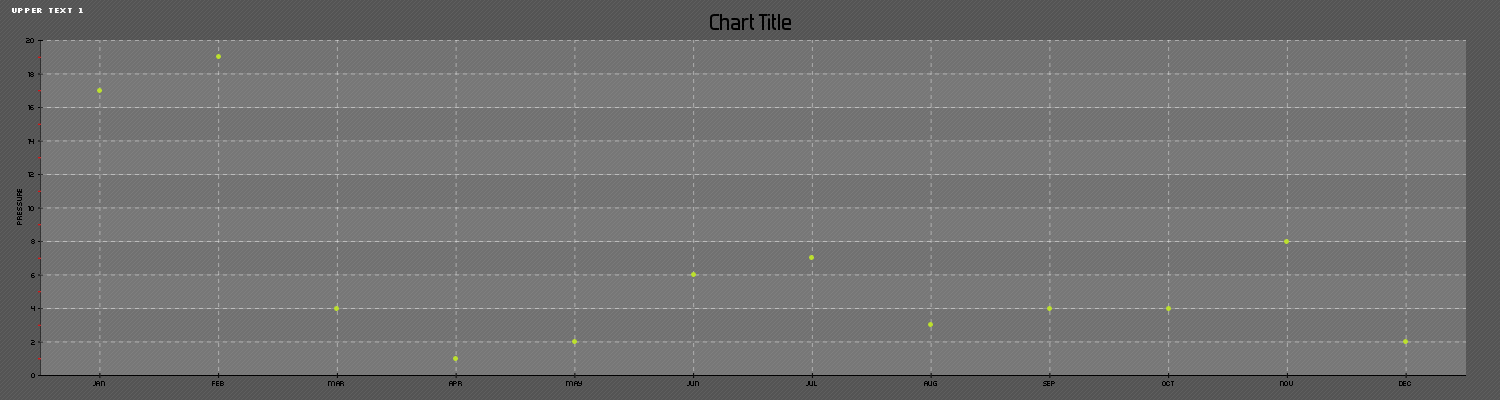
Time to get this data we’re harvesting graphed. In a couple past posts, I’ve used pChart to graph random data but now since data is getting dumped into a mysql chart, it would make sense to try and graph that data.
The code is pretty well commented so I’m not really going to get into describing it, but essentially, the following php will retrieve data from a mysql table (which is being populated by a python script seen in this post) and after leaving it on in my room for like 3 days, render this graph:
Here’s that php script:
<?php
/* Include all the classes */
include("/srv/www/lib/pChart/class/pData.class.php");
include("/srv/www/lib/pChart/class/pDraw.class.php");
include("/srv/www/lib/pChart/class/pImage.class.php");
/* Create your dataset object */
$myData = new pData();
$db = mysql_connect("localhost", "piplanter_user", "piplanter_pass"); //location of server, db username, db pass
mysql_select_db("piplanter", $db);
$Requete = "SELECT * FROM `piplanter_table_05`"; //table name
$Result = mysql_query($Requete, $db);
/*This fetches the data from the mysql database, and adds it to pchart as points*/
while($row = mysql_fetch_array($Result))
{
//$Sample_Number = $row["Sample_Number"]; //Not using this data
//$myData->addPoints($Sample_Number,"Sample_Number");
$Time = $row["Time"];
$myData->addPoints($Time,"Time");
$Temp_F = $row["Temp_F"];
$myData->addPoints($Temp_F,"Temp_F");
$LDR_V = $row["LDR_V"];
$myData->addPoints($LDR_V,"LDR_V");
}
$myData-> setSerieOnAxis("Temp_F", 0); //assigns the data to the frist axis
$myData-> setAxisName(0, "Temperature"); //adds the label to the first axis
$myData-> setSerieOnAxis("LDR_V", 1);
$myData-> setAxisName(1, "LDR");
$myData-> setAxisPosition(1,AXIS_POSITION_LEFT); //moves the second axis to the far left
$myData->setAbscissa("Time"); //sets the time data set as the x axis label
$myPicture = new pImage(1100,300,$myData); /* Create a pChart object and associate your dataset */
$myPicture->setFontProperties(array("FontName"=>"/srv/www/lib/pChart/fonts/pf_arma_five.ttf","FontSize"=>6)); /* Choose a nice font */
$myPicture->setGraphArea(80,40,1000,200); /* Define the boundaries of the graph area */
$Settings = array("R"=>250, "G"=>250, "B"=>250, "Dash"=>1, "DashR"=>0, "DashG"=>0, "DashB"=>0);
$myPicture->drawScale(array("LabelRotation"=>320)); /* Draw the scale, keep everything automatic */
/*The combination makes a cool looking graph*/
$myPicture->drawPlotChart();
$myPicture->drawLineChart();
$myPicture->drawLegend(90,20); //adds the legend
$myPicture->autoOutput(); /* Build the PNG file and send it to the web browser */
?>
I’m in a hotel trying to occupy myself with something interesting so I’ve decided to work on this. I had to re-image the SD card I’ve been developing this project on, but I saved to code so there’s no problem there. Now I need to re-install all the basic packages.
First I need to get the components of a LAMP server with the following commands:
Once you get the mysql server setup, you’ll need to create a database and tables in mysql.
To create the database you’ll be using run the following command:
CREATE DATABASE piplanter;
And then grant the proper privileges to use later with the command:
mysql> mysql> GRANT ALL PRIVILEGES ON piplanter.* TO 'user'@'localhost' IDENTIFIED BY 'pass';
FLUSH PRIVILEGES;
Then we can enter the database and create a table:
USE piplanter;
CREATE TABLE piplanter_table_01(Sample_Number INT NOT NULL AUTO_INCREMENT PRIMARY KEY, Time VARCHAR(100), Temp_F VARCHAR(100), LDR_V VARCHAR(100) );
Now we need to set up the specific libraries for python the first of which being spidev, the spi tool for the raspberry pi which we can grab from git using the following commands:
Then you need to get APscheduler, the timing program used to execute the incremental timing with the following commands:
wget https://pypi.python.org/packages/source/A/APScheduler/APScheduler-2.1.0.tar.gz
sudo tar -xzvf APScheduler-2.1.0.tar.gz
python setup.py install
You will need mysqldb to interface python and mysql:
sudo apt-get install python-mysqldb
Once you reboot, the following program should work:
#Timing setup
from datetime import datetime
from apscheduler.scheduler import Scheduler
import time
import datetime
import sys
now =datetime.datetime.now()
import logging #if you start getting logging errors, uncomment these two lines
logging.basicConfig()
#GPIO setup
import RPi.GPIO as GPIO
GPIO.setmode(GPIO.BOARD)
GPIO.cleanup()
pin = 26 #pin for the adc
GPIO.setup(pin, GPIO.OUT)
led1 = 11 #pin for the short indicator led
GPIO.setup(led1, GPIO.OUT)
led2 = 13 #pin for other long indicator led
GPIO.setup(led2, GPIO.OUT)
#the adc's SPI setup
import spidev
spi = spidev.SpiDev()
spi.open(0, 0)
import MySQLdb
con = MySQLdb.connect('localhost','piplanter_user','piplanter_pass','piplanter');
cursor = con.cursor()
#fuction that can read the adc
def readadc(adcnum):
# read SPI data from MCP3008 chip, 8 possible adc's (0 thru 7)
if adcnum > 7 or adcnum < 0:
return -1
r = spi.xfer2([1, 8 + adcnum << 4, 0])
adcout = ((r[1] & 3) << 8) + r[2]
return adcout
def rapidSample():
sampleTime = time.ctime()
sampleTemp1 = (((readadc(0)*3.3)/1024)/(10.0/1000)) #this translates the analog voltage to temperature in def F
sampleLght1 = readadc(1)
samplePot1 = readadc(2)
GPIO.output(led1, True) #turns the led on
time.sleep(.1) #sleeps a little bit so you can see the LED on
print "Job 1", sampleTime,"LDR:",sampleLght1 ,"Pot:",samplePot1,"Temp:",sampleTemp1 #prints the debug info
cursor.execute("INSERT INTO piplanter_table_02(Time,Temp_F,LDR_V) VALUES(%s,'%s','%s')",(sampleTime,sampleTemp1,sampleLght1))
con.commit() #this is important for live updating
time.sleep(.1)
GPIO.output(led1, False) #turns the led off
def slowSample():
sampleTime = time.ctime()
sampleTemp1 = (((readadc(0)*3.3)/1024)/(10.0/1000)) #this translates the analog voltage to temperature in def F
sampleLght1 = readadc(1)
samplePot1 = readadc(2)
GPIO.output(led2, True) #turns the led on
time.sleep(5)
print "Job 2", sampleTime,"LDR:",sampleLght1 ,"Pot:",samplePot1,"Temp:",sampleTemp1 #prints the debug info
cursor.execute("INSERT INTO piplanter_table_03(Time,Temp_F,LDR_V) VALUES(%s,'%s','%s')",(sampleTime,sampleTemp1,sampleLght1))
con.commit() #this is important for live updating
time.sleep(5)
GPIO.output(led2, False) #turns the led on
if __name__ == '__main__':
#the following 3 lines start up the interval job and keep it going
scheduler = Scheduler(standalone=True)
scheduler.add_interval_job(rapidSample, minutes=1)
scheduler.add_interval_job(slowSample, hours=1)
scheduler.start()
And there you go! The program should log data every minute and then every hour to two different tables. To view those data sets as php tables you can use this php script:
I’m taking a “break” from my drone while I save some money to buy more tricopter parts, and since the weather’s getting nicer and nicer I’ve decided to start working on my PiPlanter again.
As a refresher, the PiPlanter is a Raspberry Pi powered garden. The goal is for it to just be able to be plugged in and add water to a water source and have the Pi monitor temp and moisture levels to be able to add more water as needed.
I’ve shown that is relatively easy to go from analog sensors to good looking tables and graphs using the raspberry pi, the problem that I ran into however was timing.
It became harder and harder to use the time.sleep function in python to handle long periods of time. When you are dealing with things like plants, you don’t need to water it very often, but for data’s sake, you should be polling the sensors a lot.
I’ve landed on the use of APScheduler in python, and here’s my source code:
[py]
#Timing setup
from datetime import datetime
from apscheduler.scheduler import Scheduler
import time
import logging #if you start getting logging errors, uncomment these two lines
logging.basicConfig()
#GPIO setup
import RPi.GPIO as GPIO
GPIO.setmode(GPIO.BOARD)
GPIO.cleanup()
pin = 26 #pin for the adc
GPIO.setup(pin, GPIO.OUT)
led1 = 11 #pin for the short indicator led
GPIO.setup(led1, GPIO.OUT)
led2 = 13 #pin for other long indicator led
GPIO.setup(led2, GPIO.OUT)
#fuction that can read the adc
def readadc(adcnum):
# read SPI data from MCP3008 chip, 8 possible adc’s (0 thru 7)
if adcnum > 7 or adcnum < 0:
return -1
r = spi.xfer2([1, 8 + adcnum << 4, 0])
adcout = ((r[1] & 3) << 8) + r[2]
return adcout
def rapidSample():
sampleTemp1 = (((readadc(0)*3.3)/1024)/(10.0/1000)) #this translates the analog voltage to temperature in def F
sampleLght1 = readadc(1)
samplePot1 = readadc(2)
GPIO.output(led1, True) #turns the led on
time.sleep(.1) #sleeps a little bit so you can see the LED on
print “Job 1″, datetime.now(),”LDR:”,sampleLght1 ,”Pot:”,samplePot1,”Temp:”,sampleTemp1 #prints the debug info
time.sleep(.1)
GPIO.output(led1, False) #turns the led off
def slowSample():
print “Job 2” , datetime.now()
GPIO.output(led2, True) #turns the led on
time.sleep(5)
GPIO.output(led2, False) #turns the led on
if __name__ == ‘__main__’:
#the following 3 lines start up the interval job and keep it going
scheduler = Scheduler(standalone=True)
scheduler.add_interval_job(rapidSample, seconds=1)
scheduler.add_interval_job(slowSample, minutes=1)
scheduler.start()
[/py]
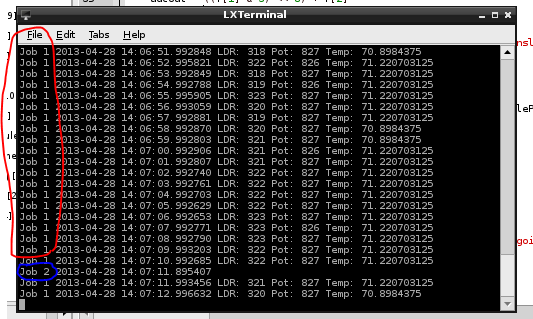
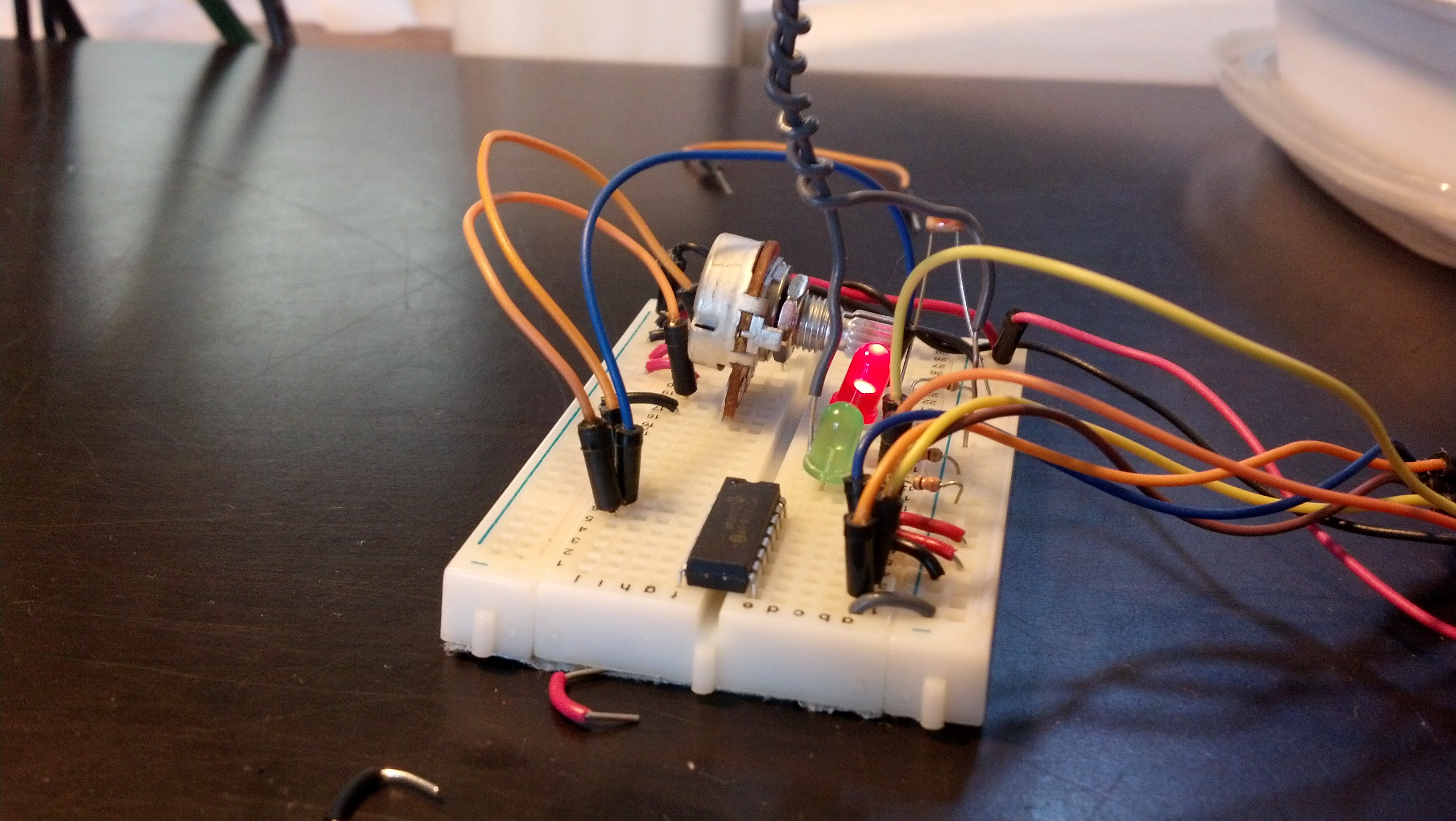
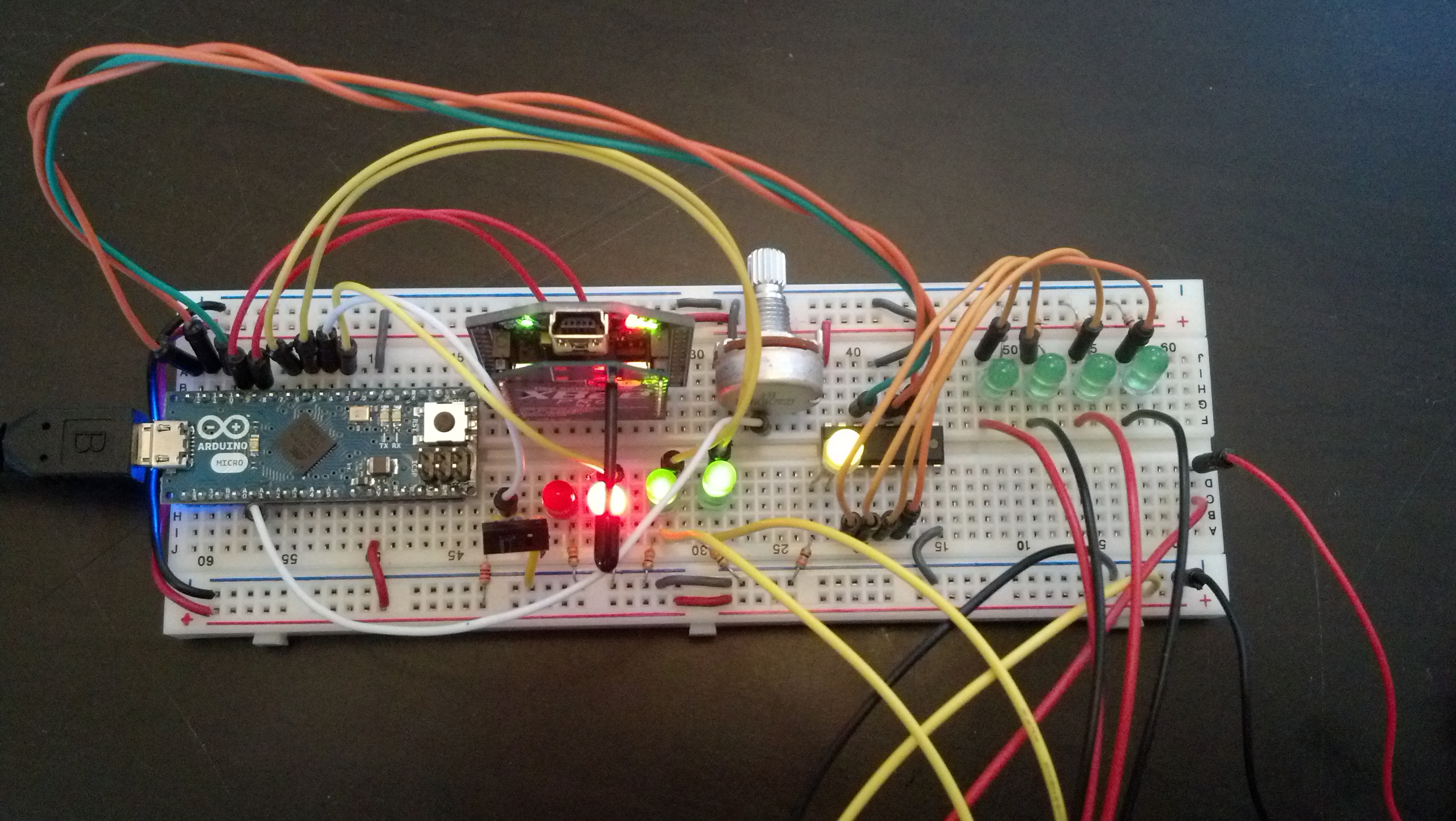
This produces a loop that flashed a green led on and of for .1 seconds at a time per second, and then every minute, turns on a speaker and a red led for 5 seconds then turns it off. There are some images of what goes on below.
Here is a picture of the the print dialog in python:
You can see that the first job (green led) posts the values from the analog sensors every second
The second job (red led) just posts the time. But the function is expandable to do anything at any time.
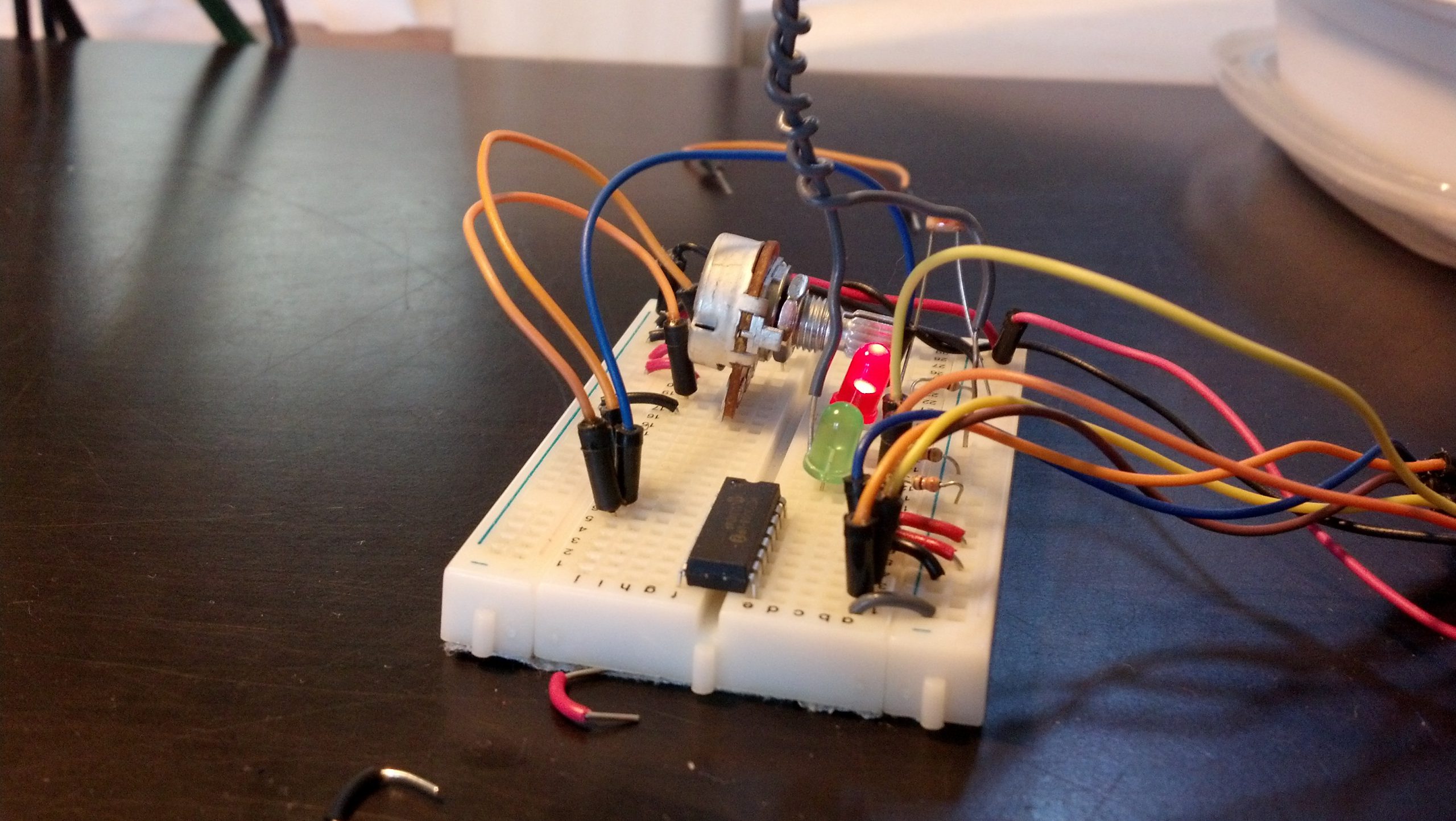
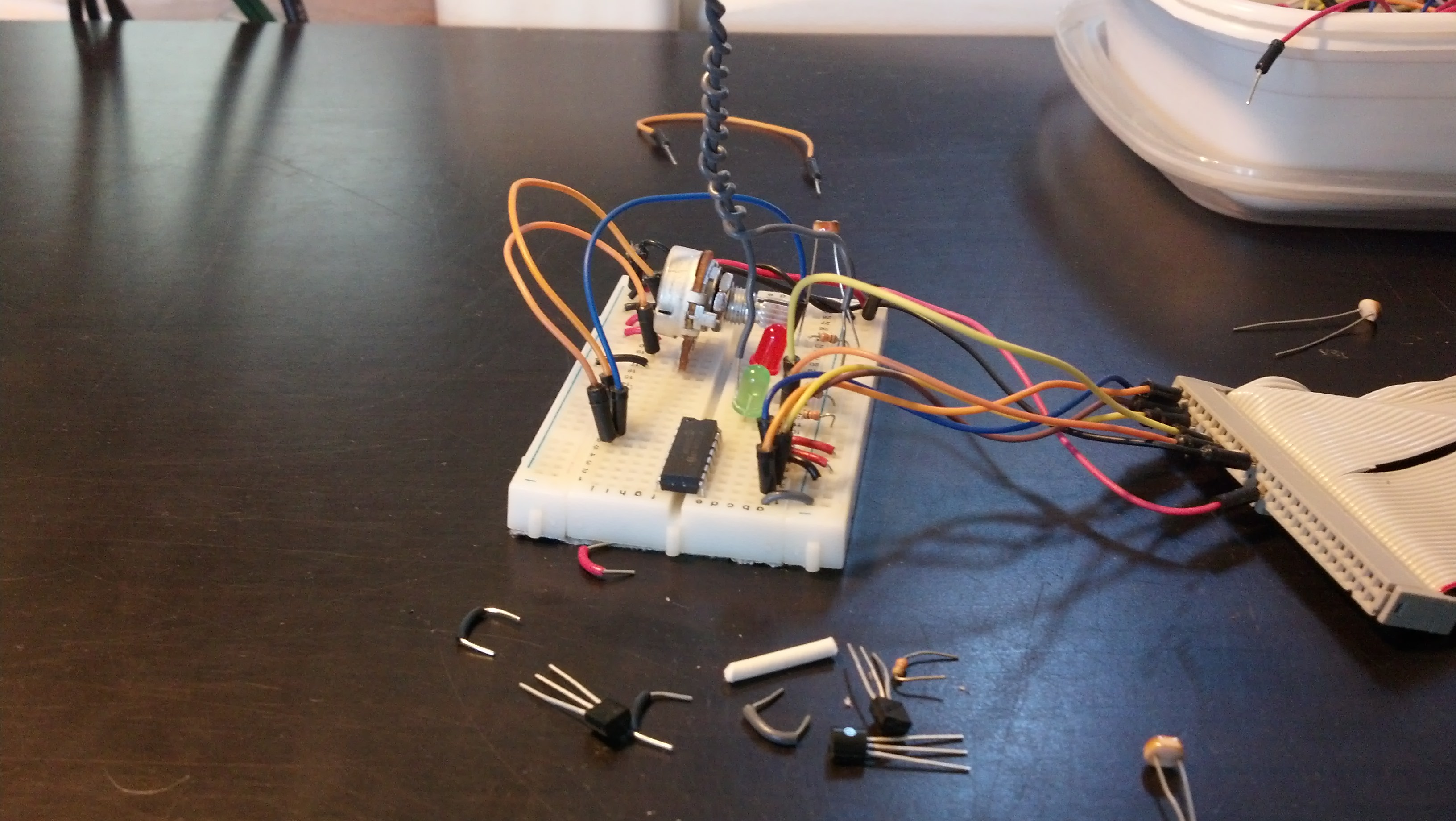
Here are pictures of the board and the circuit in action:
Both LED’s off
The Green LED on, the red circled process in the printout
Here are both on
The next step is adding the mySQL in as seen in some other posts.
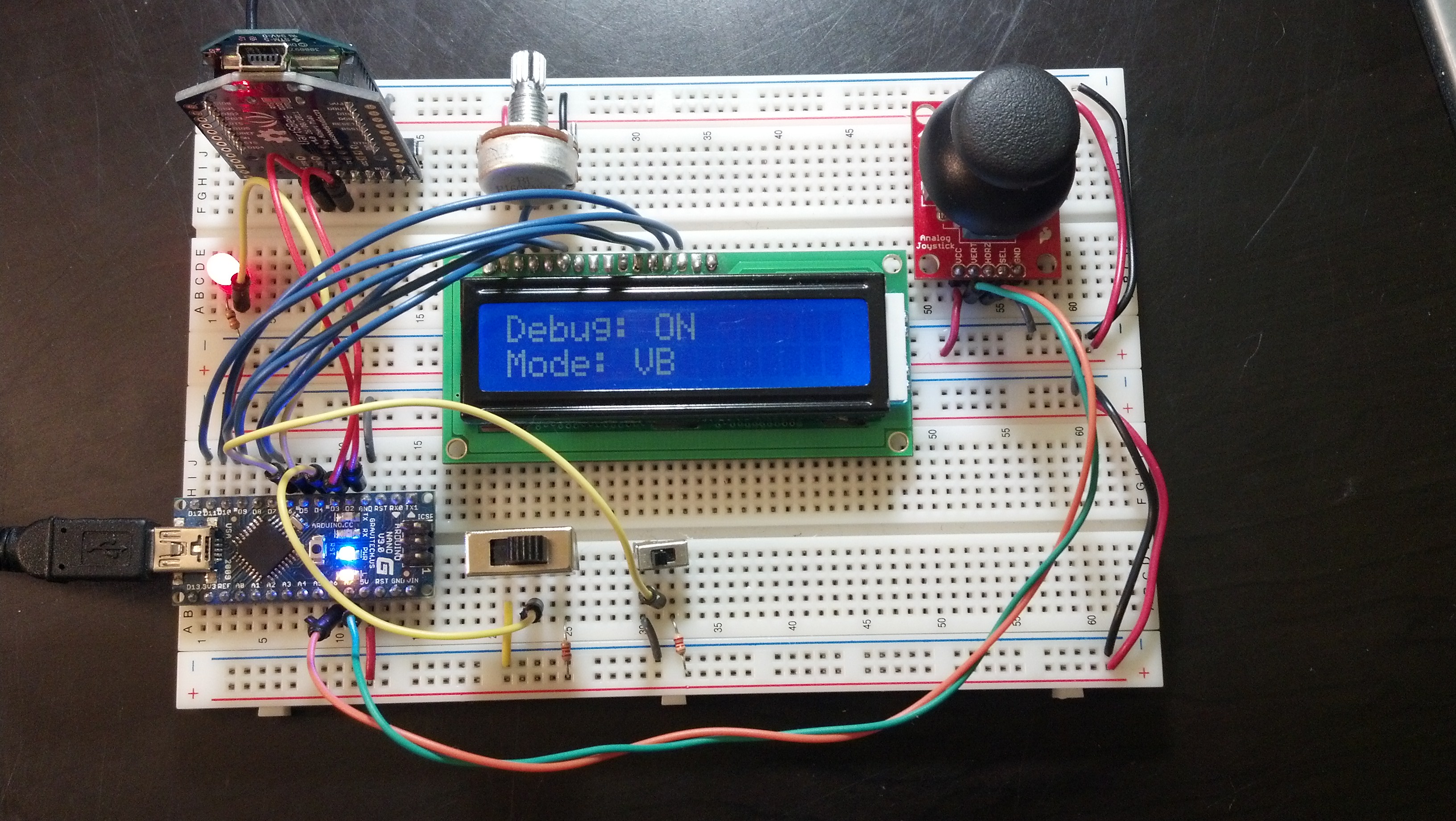
So pretty easy but important step here. For a while I’ve known that I need to have some more feedback from the robot that just LED brightness levels on the controller. This VB program allows me to get analog values from the vehicle and interpret them in any number of ways. You can download and run that program HERE, and like I said in the video I’ve refrained from going open source with my VB programs in the past because they’ve never really had any polish to them. But now I think it will be good to keep this all open.
I also added a 16 * 2 character LCD to my controller. I’ve sacrificed the 6 pins because hopefully in the long run it will be a better experience for the user. I may go back, but for now I’d rather build around something that’s a little more constraining as it will force me to innovate a little bit more. Here’s a picture of the new controller:
Here’s the program:
//Serial Handshake declaration
#include <string.h> // we'll need this for subString
#define MAX_STRING_LEN 100 // like 3 lines above, change as needed.
const char EOPmarker = '.'; //This is the end of packet marker
char serialbuf[100]; //This gives the incoming serial some room. Change it if you want a longer incoming.
//SoftwareSerial declaration
#include <SoftwareSerial.h>
SoftwareSerial xbee_serial(2, 3);
//Shift Register Pins declaration
int SER_Pin = 5; //pin 14 on the 75HC595
int RCLK_Pin = 6; //pin 12 on the 75HC595
int SRCLK_Pin = 7; //pin 11 on the 75HC595
#define number_of_74hc595s 1 //How many of the shift registers - change this
#define numOfRegisterPins number_of_74hc595s * 8 //do not touch
boolean registers[numOfRegisterPins];
//Servo declarations
int left_servo_val;
int rght_servo_val;
//lcd declaration
#include <LiquidCrystal.h>
LiquidCrystal lcd(7, 8, 9, 10, 11, 12);
//Misc Pin declaration
//inputs
int debug_switch1 = 4;
int debug_switch2 = 6;
//these values are for communication, not hardware inputs
int in_ref;
int in_brightness;
int in_pot1;
int in_pot2;
int in_accelerometer_x;
int in_accelerometer_y;
int in_accelerometer_z;
int in_temp1;
//outputs
//int pot_LED = 6;
int fade_LED = 5;
int debug_switch1_LED = 13;
//these values are for communication, not hardware outputs
int out_joystick_x;
int out_joystick_y;
//Misc Integer Declarations
int brightness = 0; // how bright the LED is
int fadeAmount = 51; // how many points to fade the LED by
int accel_x_min = 293;
int accel_x_max = 440;
int accel_y_min = 290;
int accel_y_max = 434;
void setup(){
Serial.begin(9600);
xbee_serial.begin(9600);
//shift register setup
pinMode(SER_Pin, OUTPUT);
pinMode(RCLK_Pin, OUTPUT);
pinMode(SRCLK_Pin, OUTPUT);
pinMode(0, INPUT);
clearRegisters();
writeRegisters();
//Misc Pin Declarations
pinMode(debug_switch1, INPUT);
pinMode(debug_switch2, INPUT);
//pinMode(pot_LED, OUTPUT);
pinMode(fade_LED, OUTPUT);
//lcd declaration
lcd.begin(16, 2);
xbee_serial.print("0,0,0."); // this is very important as it starts of the loop because it makes "xbee_serial.avalible() > 0.
}
void loop(){
if (xbee_serial.available() > 0) {
static int bufpos = 0;
char inchar = xbee_serial.read();
if (inchar != EOPmarker) {
serialbuf[bufpos] = inchar;
bufpos++;
}
else {
serialbuf[bufpos] = 0; //restart the buff
bufpos = 0; //restart the position of the buff
if (digitalRead(debug_switch1) == LOW){
digitalWrite(debug_switch1_LED, LOW); //LED in board indicates debug status
handshake();
lcd.setCursor(0, 0);
lcd.print("Debug: OFF");
lcd.setCursor(0, 1);
lcd.print(" ");
digitalWrite(debug_switch1_LED, LOW);
}
if (digitalRead(debug_switch1) == HIGH){
handshake(); //no matter what, the handshake happens normally
lcd.setCursor(0, 0);
lcd.print("Debug: ON ");
debug_handshake(); //the debug to console only slows the process downm no interference with data
digitalWrite(debug_switch1_LED, HIGH);
}
}
}
}
void handshake(){
//inputs, recived from vehicle
in_ref = atoi(subStr(serialbuf, "," , 1));
in_brightness = atoi(subStr(serialbuf, "," , 2));
in_pot1 = (map(atoi(subStr(serialbuf, "," , 3)),0,1023,0,255));
in_pot2 = atoi(subStr(serialbuf, "," , 4));
in_accelerometer_x = atoi(subStr(serialbuf, "," , 5));
in_accelerometer_y = atoi(subStr(serialbuf, "," , 6));
in_accelerometer_z = atoi(subStr(serialbuf, "," , 7));
in_temp1 = atoi(subStr(serialbuf, "," , 8));
analogWrite(fade_LED, in_brightness);
//analogWrite(pot_LED, in_pot1);
//outputs, sent to vehicle
brightness = brightness + fadeAmount;
// reverse the direction of the fading at the ends of the fade:
if (brightness == 0 || brightness == 255) {
fadeAmount = -fadeAmount ;
}
out_joystick_x = analogRead(7); //remap for coherency purposes
out_joystick_y = analogRead(6);
xbee_serial.print(brightness);
xbee_serial.print(",");
xbee_serial.print(out_joystick_x);
xbee_serial.print(",");
xbee_serial.print(out_joystick_y);
xbee_serial.print("."); //EOP marker
delay(10);
}
void debug_handshake() { //there are two debug modes
if (digitalRead(debug_switch2) == HIGH){
lcd.setCursor(0, 1);
lcd.print("Mode: 1 Line");
debug_handshake_fncy(); //this is good for looking at one line at a time (via the port monitor)
}
if (digitalRead(debug_switch2) == LOW){
debug_handshake_smpl(); //this is great for data interpretation (via VB)
lcd.setCursor(0, 1);
lcd.print("Mode: VB ");
}
}
void debug_handshake_fncy(){
Serial.print("INPUTS {");
Serial.print("refvolt: ");
Serial.print(in_ref);
Serial.print(",");
Serial.print(" fade: ");
Serial.print(brightness);
Serial.print(",");
Serial.print(" LED1: ");
Serial.print(in_pot1);
Serial.print(",");
Serial.print(" pot2: ");
Serial.print(in_pot2);
Serial.print(",");
Serial.print(" accel_x: ");
Serial.print(in_accelerometer_x);
Serial.print(",");
Serial.print(" accel_y: ");
Serial.print(in_accelerometer_y);
Serial.print(",");
Serial.print(" accel_z: ");
Serial.print(in_accelerometer_z);
Serial.print(",");
Serial.print(" temp1: ");
Serial.print(in_temp1);
Serial.print("}");
Serial.print(" | ");
Serial.print("OUTPUTS {");
Serial.print("joystick_x: ");
Serial.print(out_joystick_x);
Serial.print(",");
Serial.print(" joystick_y: ");
Serial.print(out_joystick_y);
Serial.print("}");
Serial.println("");
}
void debug_handshake_smpl(){ //just inputs seperated by commas then a | then outputs seperated by commas
Serial.print(in_ref);
Serial.print(",");
Serial.print(brightness);
Serial.print(",");
Serial.print(in_pot1);
Serial.print(",");
Serial.print(in_pot2);
Serial.print(",");
Serial.print(in_accelerometer_x);
Serial.print(",");
Serial.print(in_accelerometer_y);
Serial.print(",");
Serial.print(in_accelerometer_z);
Serial.print(",");
Serial.print(in_temp1);
Serial.print(",");
Serial.print("|");
Serial.print(out_joystick_x);
Serial.print(",");
Serial.print(out_joystick_y);
Serial.println("");
}
char* subStr (char* input_string, char *separator, int segment_number) { //for substring
char *act, *sub, *ptr;
static char copy[MAX_STRING_LEN];
int i;
strcpy(copy, input_string);
for (i = 1, act = copy; i <= segment_number; i++, act = NULL) {
sub = strtok_r(act, separator, &ptr);
if (sub == NULL) break;
}
return sub;
}
void clearRegisters(){ //for shift registers
for(int i = numOfRegisterPins - 1; i >= 0; i--){
registers[i] = LOW;
}
}
void writeRegisters(){ //for shift registers
digitalWrite(RCLK_Pin, LOW);
for(int i = numOfRegisterPins - 1; i >= 0; i--){
digitalWrite(SRCLK_Pin, LOW);
int val = registers[i];
digitalWrite(SER_Pin, val);
digitalWrite(SRCLK_Pin, HIGH);
}
digitalWrite(RCLK_Pin, HIGH);
}
//set an individual pin HIGH or LOW
void setRegisterPin(int index, int value){
registers[index] = value;
}
I didn’t mention in in the video, but I moved the mux from the controller, to the vehicle. It allows me to have 22 analog inputs, and the reason I took so long to finally add it was primarily laziness on my part. Aside from the the code is still very similar but close followers will notice that I cleaned up the way the program receives and sends code. It is much much more organized, and much more expandable. Here’s the “new” controller:
Here’s the new program:
//Serial Handshake declaration
#include <string.h> // we'll need this for subString
#define MAX_STRING_LEN 100 // like 3 lines above, change as needed.
const char EOPmarker = '.'; //This is the end of packet marker
char serialbuf[100]; //This gives the incoming serial some room. Change it if you want a longer incoming.
//SoftwareSerial declaration
#include <SoftwareSerial.h>
SoftwareSerial xbee_serial(8, 9);
//Mux control pins declarations
int s0 = 2;
int s1 = 3;
int s2 = 4;
int s3 = 7;
int SIG_pin = 0;
//Shift Register Pins declaration
int SER_Pin = 10; //pin 14 on the 75HC595
int RCLK_Pin = 11; //pin 12 on the 75HC595
int SRCLK_Pin = 12; //pin 11 on the 75HC595
#define number_of_74hc595s 1 //How many of the shift registers - change this
#define numOfRegisterPins number_of_74hc595s * 8 //do not touch
boolean registers[numOfRegisterPins];
//Servo declarations
#include <Servo.h>
Servo left_servo;
Servo rght_servo;
//Misc Pin declaration
//inputs
int debug_switch1 = 4;
//outputs
//these values are for communication, not hardware outputs
int out_ref;
int out_pot1;
int out_pot2;
int out_accelerometer_x;
int out_accelerometer_y;
int out_accelerometer_z;
int out_temp1;
int fade_LED = 13;
int x_LED = 5;
int y_LED = 6;
//int debug_switch1_LED = 12;
//Misc Integer declarations
int in_brightness;
int in_joystick_x;
int in_joystick_y;
int brightness = 0; // how bright the LED is
int fadeAmount = 51; // how many points to fade the LED by
int x_upperTrigger = 600;
int x_lowerTrigger = 450;
int y_upperTrigger = 600;
int y_lowerTrigger = 400;
void setup(){
Serial.begin(9600);
xbee_serial.begin(9600);
//mux setup
pinMode(s0, OUTPUT);
pinMode(s1, OUTPUT);
pinMode(s2, OUTPUT);
pinMode(s3, OUTPUT);
digitalWrite(s0, LOW);
digitalWrite(s1, LOW);
digitalWrite(s2, LOW);
digitalWrite(s3, LOW);
//shift register setup
pinMode(SER_Pin, OUTPUT);
pinMode(RCLK_Pin, OUTPUT);
pinMode(SRCLK_Pin, OUTPUT);
clearRegisters();
writeRegisters();
//misc pin declarations
pinMode(x_LED, OUTPUT);
pinMode(y_LED, OUTPUT);
pinMode(fade_LED, OUTPUT);
xbee_serial.print("0,0,0."); // this is very important as it starts of the loop because it makes "xbee_serial.avalible() > 0.
}
void loop(){
if (xbee_serial.available() > 0) {
static int bufpos = 0;
char inchar = xbee_serial.read();
if (inchar != EOPmarker) {
serialbuf[bufpos] = inchar;
bufpos++;
}
else {
serialbuf[bufpos] = 0; //restart the buff
bufpos = 0; //restart the position of the buff
handshake();
setRegisterPin(1, HIGH);
writeRegisters();
}
}
}
void handshake(){
//inputs
in_brightness = atoi(subStr(serialbuf, "," , 1));
in_joystick_x = atoi(subStr(serialbuf, "," , 2));
in_joystick_y = atoi(subStr(serialbuf, "," , 3));
analogWrite(fade_LED,in_brightness);
if (in_joystick_x > x_upperTrigger){ //the below boolean blocks set pins high or low
setRegisterPin(4,HIGH);
setRegisterPin(5,LOW);
analogWrite(x_LED, map(in_joystick_x,x_upperTrigger,1023,0,255));
writeRegisters();
}
if (in_joystick_x < x_lowerTrigger){
setRegisterPin(4,LOW);
setRegisterPin(5,HIGH);
analogWrite(x_LED, map(in_joystick_x,x_upperTrigger,0,0,255));
writeRegisters();
}
if (in_joystick_x > x_lowerTrigger && in_joystick_x < x_upperTrigger){
setRegisterPin(4,LOW);
setRegisterPin(5,LOW);
analogWrite(x_LED,0);
writeRegisters();
}
// x above y below
if (in_joystick_y > y_upperTrigger){
setRegisterPin(2,HIGH);
setRegisterPin(3,LOW);
analogWrite(y_LED, map(in_joystick_y,y_upperTrigger,1023,0,255));
writeRegisters();
}
if (in_joystick_y < y_lowerTrigger){
setRegisterPin(2,LOW);
setRegisterPin(3,HIGH);
analogWrite(y_LED, map(in_joystick_y,y_upperTrigger,0,0,255));
writeRegisters();
}
if (in_joystick_y > y_lowerTrigger && in_joystick_y < y_upperTrigger){
setRegisterPin(2,LOW);
setRegisterPin(3,LOW);
analogWrite(y_LED,0);
writeRegisters();
}
//outputs
brightness = brightness + fadeAmount;
// reverse the direction of the fading at the ends of the fade:
if (brightness == 0 || brightness == 255) {
fadeAmount = -fadeAmount ;
}
out_ref = readMux(15);
out_pot1 = readMux(0);
out_pot2 = readMux(1);
out_accelerometer_x = readMux(2);
out_accelerometer_y = readMux(3);
out_accelerometer_z = readMux(4);
out_temp1 = readMux(5);
xbee_serial.print(out_ref);
xbee_serial.print(",");
xbee_serial.print(brightness);
xbee_serial.print(",");
xbee_serial.print(out_pot1);
xbee_serial.print(",");
xbee_serial.print(out_pot2);
xbee_serial.print(",");
xbee_serial.print(out_accelerometer_x);
xbee_serial.print(",");
xbee_serial.print(out_accelerometer_y);
xbee_serial.print(",");
xbee_serial.print(out_accelerometer_z);
xbee_serial.print(",");
xbee_serial.print(out_temp1);
xbee_serial.print("."); //EOP marker
delay(10);
}
// for substring
char* subStr (char* input_string, char *separator, int segment_number) {
char *act, *sub, *ptr;
static char copy[MAX_STRING_LEN];
int i;
strcpy(copy, input_string);
for (i = 1, act = copy; i <= segment_number; i++, act = NULL) {
sub = strtok_r(act, separator, &ptr);
if (sub == NULL) break;
}
return sub;
}
// for mux
int readMux(int channel){
int controlPin[] = {s0, s1, s2, s3};
int muxChannel[16][4]={
{0,0,0,0}, //channel 0
{1,0,0,0}, //channel 1
{0,1,0,0}, //channel 2
{1,1,0,0}, //channel 3
{0,0,1,0}, //channel 4
{1,0,1,0}, //channel 5
{0,1,1,0}, //channel 6
{1,1,1,0}, //channel 7
{0,0,0,1}, //channel 8
{1,0,0,1}, //channel 9
{0,1,0,1}, //channel 10
{1,1,0,1}, //channel 11
{0,0,1,1}, //channel 12
{1,0,1,1}, //channel 13
{0,1,1,1}, //channel 14
{1,1,1,1} //channel 15
};
//loop through the 4 sig
for(int i = 0; i < 4; i ++){
digitalWrite(controlPin[i], muxChannel[channel][i]);
}
//read the value at the SIG pin
int val = analogRead(SIG_pin);
//return the value
return val;
}
// for shift registers
void clearRegisters(){
for(int i = numOfRegisterPins - 1; i >= 0; i--){
registers[i] = LOW;
}
}
// for shift registers
void writeRegisters(){
digitalWrite(RCLK_Pin, LOW);
for(int i = numOfRegisterPins - 1; i >= 0; i--){
digitalWrite(SRCLK_Pin, LOW);
int val = registers[i];
digitalWrite(SER_Pin, val);
digitalWrite(SRCLK_Pin, HIGH);
}
digitalWrite(RCLK_Pin, HIGH);
}
//set an individual pin HIGH or LOW
void setRegisterPin(int index, int value){
registers[index] = value;
}
Like I promised in the video, here are a few more properly focused pictures:
So as school and sports start to ramp up, it’s going to get harder and harder to make time for this project as I want to complete it by the first week of summer.
I made some huge progress today, but it’s really still a baby step, the proof of concept using a brushless motor was reassuring that this will be expandable into something that is powered by brushless motors (some kind of tricopter) but there’s still quite a lot to get done.
First things first, I’d like to get started on re-tooling “Vehicle_Companion” to fit the needs of this new communication protocol I’ve established. Before it acted as an intermediate between the Arduinos, and now it shouldn’t have any effect on that at all, and should only supply visual feedback from the controller.
Reason being is that I need to get more feedback from the drone than led brightness levels. Plus I’m getting a little tired of C, it’ll be good to get back into VB for a while.
I also need to come up with a way to power the controller. Plain and simple it doesn’t make sense that it’s still tied to a computer.
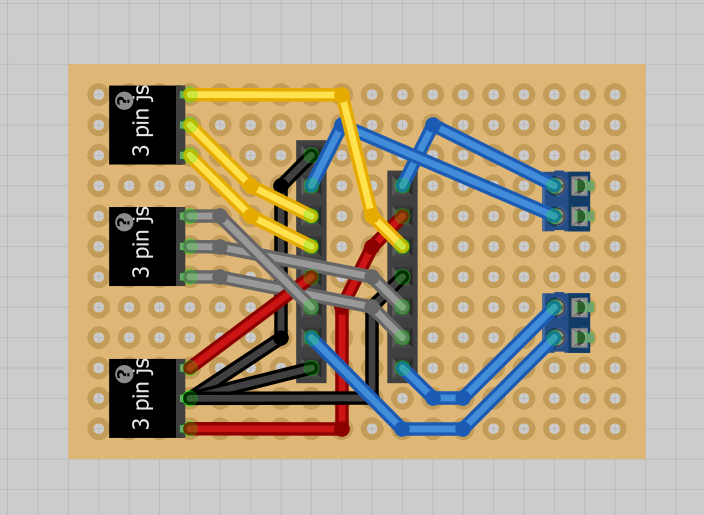
After that I need to start locking down the vehicle’s PCB. I don’t need to do this to the controller as it’s BOUND to go through countless revisions as the vehicle does. Since the RC car is going to be able to be operated basically with just the joystick, It wouldn’t make sense to over complicate things. Here’s a preview of what it may look like.
After that it’s time to make some decisions on what the final form of this thing is going to be, I go back and forth because of a few reasons but for now I that some sort of multirotor is going to be the best.
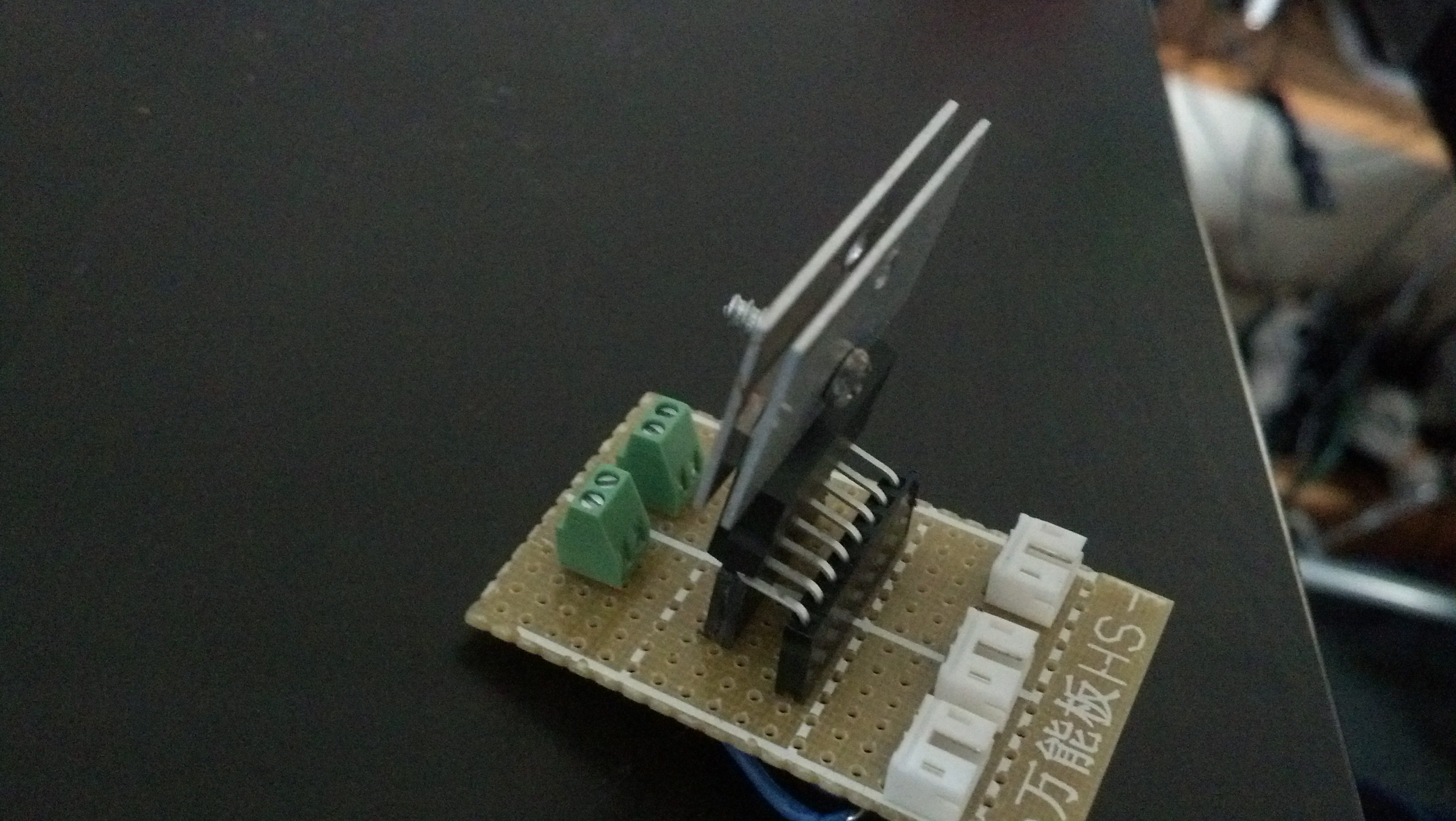
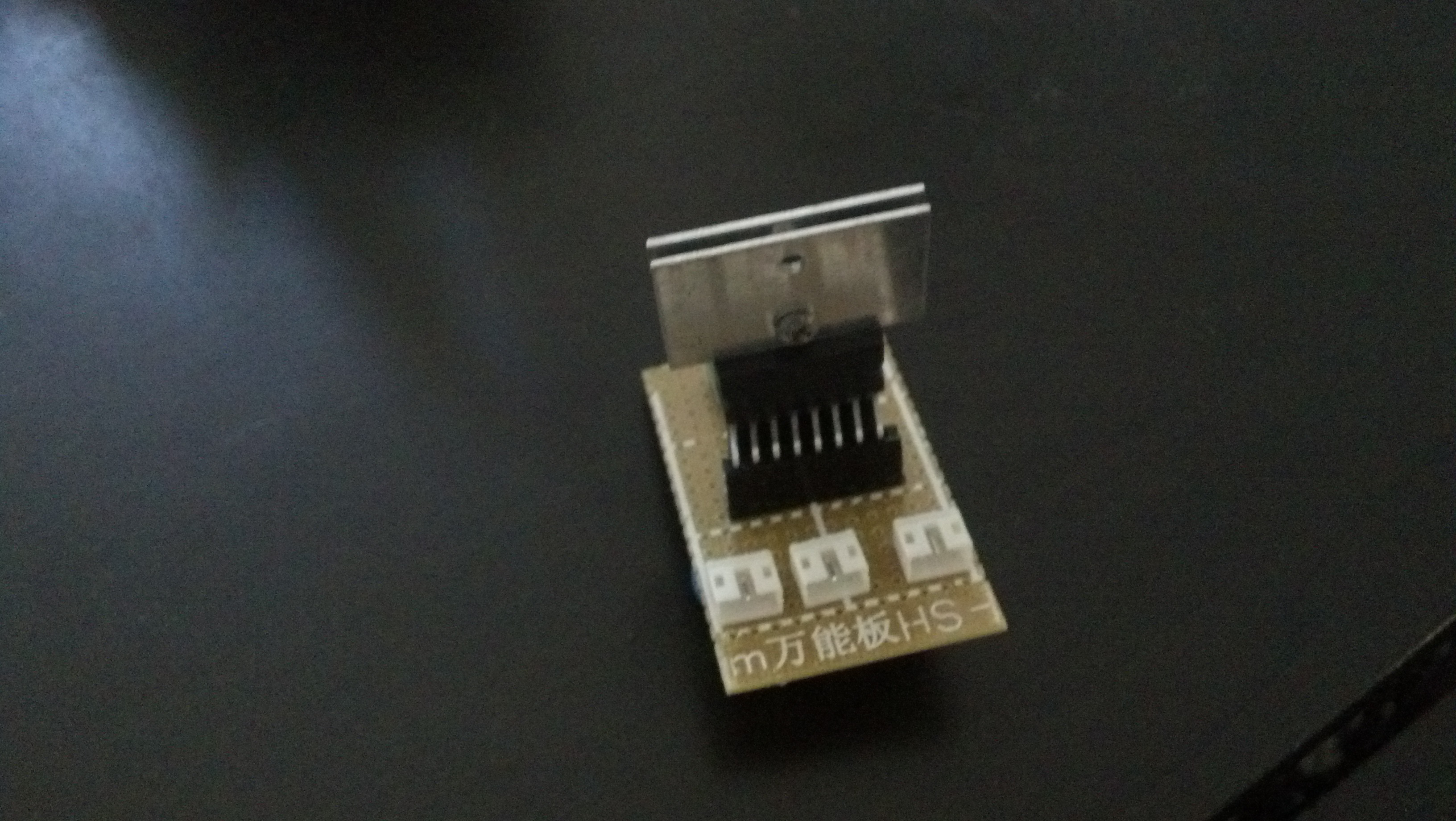
I’m pretty proud of this one, the only problem of this is that the l298N get’s too hot, you can see in the pictures that I’ve installed a makeshift heatsink but it still get’s really hot:
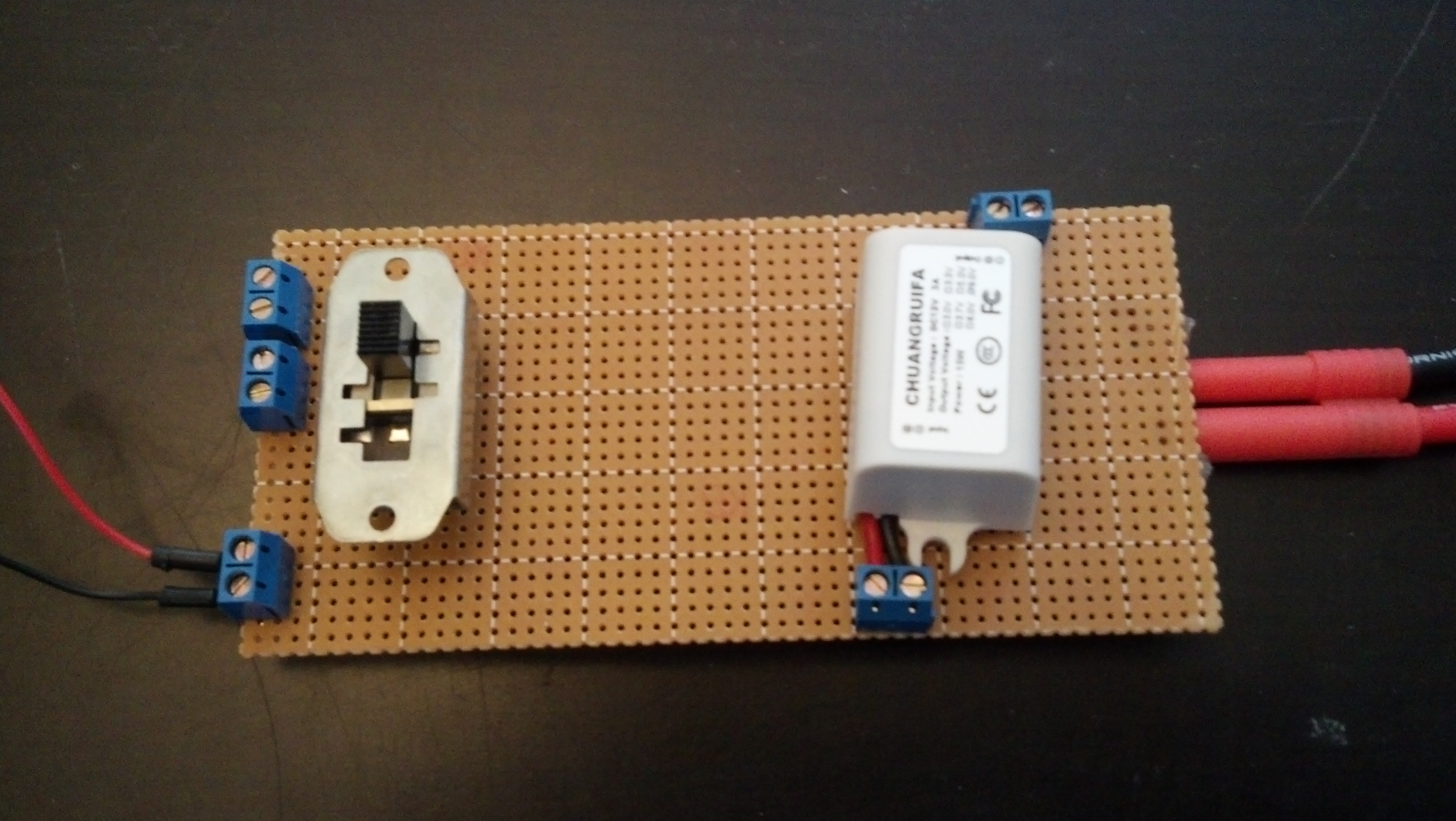
I also installed the 5v@3a regulator I mentioned in the last post, here are some pictures:
Here’s the vehicle code:
//Serial Handshake declaration
#include // we'll need this for subString
#define MAX_STRING_LEN 20 // like 3 lines above, change as needed.
const char EOPmarker = '.'; //This is the end of packet marker
char serialbuf[32]; //This gives the incoming serial some room. Change it if you want a longer incoming.
//SoftwareSerial declaration
#include
SoftwareSerial xbee_serial(8, 9);
//Shift Register Pins declaration
int SER_Pin = 10; //pin 14 on the 75HC595
int RCLK_Pin = 11; //pin 12 on the 75HC595
int SRCLK_Pin = 12; //pin 11 on the 75HC595
#define number_of_74hc595s 1 //How many of the shift registers - change this
#define numOfRegisterPins number_of_74hc595s * 8 //do not touch
boolean registers[numOfRegisterPins];
//Servo declarations
#include
Servo left_servo;
Servo rght_servo;
//Misc Pin declaration
//inputs
int pot = 1;
int debug_switch1 = 4;
//outputs
int fade_LED = 13;
int x_LED = 5;
int y_LED = 6;
//int debug_switch1_LED = 12;
//Misc Integer declarations
int brightness = 0; // how bright the LED is
int fadeAmount = 20; // how many points to fade the LED by
int x_upperTrigger = 600;
int x_lowerTrigger = 400;
int y_upperTrigger = 600;
int y_lowerTrigger = 400;
void setup(){
Serial.begin(9600);
xbee_serial.begin(9600);
pinMode(SER_Pin, OUTPUT);
pinMode(RCLK_Pin, OUTPUT);
pinMode(SRCLK_Pin, OUTPUT);
pinMode(0, INPUT);
clearRegisters();
writeRegisters();
pinMode(pot, INPUT);
pinMode(debug_switch1, INPUT);
pinMode(x_LED, OUTPUT);
pinMode(y_LED, OUTPUT);
pinMode(fade_LED, OUTPUT);
xbee_serial.print("0,0,0."); // this is very important as it starts of the loop because it makes "xbee_serial.avalible() > 0.
}
void loop(){
if (xbee_serial.available() > 0) {
static int bufpos = 0;
char inchar = xbee_serial.read();
if (inchar != EOPmarker) {
serialbuf[bufpos] = inchar;
bufpos++;
}
else {
serialbuf[bufpos] = 0; //restart the buff
bufpos = 0; //restart the position of the buff
handshake();
debug_handshake();
setRegisterPin(1, HIGH);
writeRegisters();
}
}
}
void handshake(){
//input, recived from controller
// led1val,ledval2,fade_LEDvalue.
//analogWrite(x_LED, map(atoi(subStr(serialbuf, "," , 1)),0,1023,0,255));
//analogWrite(y_LED, map(atoi(subStr(serialbuf, "," , 2)),0,1023,0,255));
analogWrite(fade_LED, atoi(subStr(serialbuf, "," , 3)));
brightness = brightness + fadeAmount;
// reverse the direction of the fading at the ends of the fade:
if (brightness == 0 || brightness == 255) {
fadeAmount = -fadeAmount ;
}
if (atoi(subStr(serialbuf, "," , 1)) > x_upperTrigger ){
analogWrite(x_LED, map(atoi(subStr(serialbuf, "," , 1)),512,1023,0,255));
setRegisterPin(2, HIGH);
setRegisterPin(3, LOW);
writeRegisters();
}
if (atoi(subStr(serialbuf, "," , 1)) < x_lowerTrigger ){
analogWrite(x_LED, map(atoi(subStr(serialbuf, "," , 1)),512,0,0,255));
setRegisterPin(2, LOW);
setRegisterPin(3, HIGH);
writeRegisters();
}
if (atoi(subStr(serialbuf, "," , 1)) > x_lowerTrigger && atoi(subStr(serialbuf, "," , 1)) < x_upperTrigger){
setRegisterPin(2, LOW);
setRegisterPin(3, LOW);
writeRegisters();
}
if (atoi(subStr(serialbuf, "," , 2)) > y_upperTrigger ){
analogWrite(y_LED, map(atoi(subStr(serialbuf, "," , 2)),512,1023,0,255));
setRegisterPin(4, HIGH);
setRegisterPin(5, LOW);
writeRegisters();
}
if (atoi(subStr(serialbuf, "," , 2)) < y_lowerTrigger ){
analogWrite(y_LED, map(atoi(subStr(serialbuf, "," , 2)),512,0,0,255));
setRegisterPin(4, LOW);
setRegisterPin(5, HIGH);
writeRegisters();
}
if (atoi(subStr(serialbuf, "," , 2)) > y_lowerTrigger && atoi(subStr(serialbuf, "," , 2)) < y_upperTrigger){
setRegisterPin(4, LOW);
setRegisterPin(5, LOW);
writeRegisters();
}
//output, sent to controller
//ledpot1,fade_LEDval.
xbee_serial.print(analogRead(pot));
xbee_serial.print(",");
xbee_serial.print(brightness); //This second byte is for the purpose of the program, it is not being used.
xbee_serial.print("."); //EOP marker
delay(10);
}
void debug_handshake(){
//input, recived from controller
Serial.print("VEHICLE DEBUG: ");
Serial.print("INPUTS|");
Serial.print(" x_LED: ");
Serial.print(map(atoi(subStr(serialbuf, "," , 1)),0,1023,0,255));
Serial.print(" y_LED: ");
Serial.print(map(atoi(subStr(serialbuf, "," , 2)),0,1023,0,255));
Serial.print(" in fade_LED: ");
Serial.print(atoi(subStr(serialbuf, "," , 3)));
//output, sent to controller
Serial.print(" OUTPUTS|");
Serial.print(" Pot 1: ");
Serial.print(analogRead(pot));
Serial.print(" out fade_LED: ");
Serial.print(brightness);
Serial.println("");
}
char* subStr (char* input_string, char *separator, int segment_number) {
char *act, *sub, *ptr;
static char copy[MAX_STRING_LEN];
int i;
strcpy(copy, input_string);
for (i = 1, act = copy; i <= segment_number; i++, act = NULL) {
sub = strtok_r(act, separator, &ptr);
if (sub == NULL) break;
}
return sub;
}
void clearRegisters(){
for(int i = numOfRegisterPins - 1; i >= 0; i--){
registers[i] = LOW;
}
}
void writeRegisters(){
digitalWrite(RCLK_Pin, LOW);
for(int i = numOfRegisterPins - 1; i >= 0; i--){
digitalWrite(SRCLK_Pin, LOW);
int val = registers[i];
digitalWrite(SER_Pin, val);
digitalWrite(SRCLK_Pin, HIGH);
}
digitalWrite(RCLK_Pin, HIGH);
}
//set an individual pin HIGH or LOW
void setRegisterPin(int index, int value){
registers[index] = value;
}
Here’s the controller code:
//Serial Handshake declaration
#include // we'll need this for subString
#define MAX_STRING_LEN 20 // like 3 lines above, change as needed.
const char EOPmarker = '.'; //This is the end of packet marker
char serialbuf[32]; //This gives the incoming serial some room. Change it if you want a longer incoming.
//SoftwareSerial declaration
#include
SoftwareSerial xbee_serial(2, 3);
//Mux control pins declarations
int s0 = 8;
int s1 = 9;
int s2 = 10;
int s3 = 11;
int SIG_pin = 0;
//Shift Register Pins declaration
int SER_Pin = 5; //pin 14 on the 75HC595
int RCLK_Pin = 6; //pin 12 on the 75HC595
int SRCLK_Pin = 7; //pin 11 on the 75HC595
#define number_of_74hc595s 1 //How many of the shift registers - change this
#define numOfRegisterPins number_of_74hc595s * 8 //do not touch
boolean registers[numOfRegisterPins];
//Servo declarations
int left_servo_val;
int rght_servo_val;
//Misc Pin declaration
//inputs
int debug_switch1 = 4;
//outputs
int pot_LED = 5;
int fade_LED = 6;
int debug_switch1_LED = 2;
//Misc Integer Declarations
int joystick_x;
int joystick_y;
int brightness = 0; // how bright the LED is
int fadeAmount = 20; // how many points to fade the LED by
void setup(){
Serial.begin(9600);
xbee_serial.begin(9600);
//mux setup
pinMode(s0, OUTPUT);
pinMode(s1, OUTPUT);
pinMode(s2, OUTPUT);
pinMode(s3, OUTPUT);
digitalWrite(s0, LOW);
digitalWrite(s1, LOW);
digitalWrite(s2, LOW);
digitalWrite(s3, LOW);
//shift register setup
pinMode(SER_Pin, OUTPUT);
pinMode(RCLK_Pin, OUTPUT);
pinMode(SRCLK_Pin, OUTPUT);
pinMode(0, INPUT);
clearRegisters();
writeRegisters();
//Misc Pin Declarations
pinMode(pot_LED, OUTPUT);
xbee_serial.print("0,0,0."); // this is very important as it starts of the loop because it makes "xbee_serial.avalible() > 0.
}
void loop(){
if (xbee_serial.available() > 0) {
static int bufpos = 0;
char inchar = xbee_serial.read();
if (inchar != EOPmarker) {
serialbuf[bufpos] = inchar;
bufpos++;
}
else {
serialbuf[bufpos] = 0; //restart the buff
bufpos = 0; //restart the position of the buff
handshake();
}
}
}
void handshake(){
//input, recived from vehicle
//led1.
analogWrite(pot_LED, map(atoi(subStr(serialbuf, "," , 1)),0,1023,0,255));
analogWrite(fade_LED, atoi(subStr(serialbuf, "," , 2)));
brightness = brightness + fadeAmount;
// reverse the direction of the fading at the ends of the fade:
if (brightness == 0 || brightness == 255) {
fadeAmount = -fadeAmount ;
}
//output, sent to vehicle
//joystick1_ledval,joystick2_ledval,fade_LED.
analogRemap();
xbee_serial.print(joystick_x); // Value that it sends over the serial
xbee_serial.print(",");
xbee_serial.print(joystick_y); //This second byte is for the purpose of the program, it is not being used.
xbee_serial.print(",");
xbee_serial.print(brightness);
xbee_serial.print("."); //EOP marker
delay(10);
}
void debug_handshake(){
}
void analogRemap(){
joystick_x = readMux(15);
joystick_y = readMux(14);
}
char* subStr (char* input_string, char *separator, int segment_number) {
char *act, *sub, *ptr;
static char copy[MAX_STRING_LEN];
int i;
strcpy(copy, input_string);
for (i = 1, act = copy; i <= segment_number; i++, act = NULL) {
sub = strtok_r(act, separator, &ptr);
if (sub == NULL) break;
}
return sub;
}
int readMux(int channel){
int controlPin[] = {s0, s1, s2, s3};
int muxChannel[16][4]={
{0,0,0,0}, //channel 0
{1,0,0,0}, //channel 1
{0,1,0,0}, //channel 2
{1,1,0,0}, //channel 3
{0,0,1,0}, //channel 4
{1,0,1,0}, //channel 5
{0,1,1,0}, //channel 6
{1,1,1,0}, //channel 7
{0,0,0,1}, //channel 8
{1,0,0,1}, //channel 9
{0,1,0,1}, //channel 10
{1,1,0,1}, //channel 11
{0,0,1,1}, //channel 12
{1,0,1,1}, //channel 13
{0,1,1,1}, //channel 14
{1,1,1,1} //channel 15
};
//loop through the 4 sig
for(int i = 0; i < 4; i ++){
digitalWrite(controlPin[i], muxChannel[channel][i]);
}
//read the value at the SIG pin
int val = analogRead(SIG_pin);
//return the value
return val;
}
void clearRegisters(){
for(int i = numOfRegisterPins - 1; i >= 0; i--){
registers[i] = LOW;
}
}
void writeRegisters(){
digitalWrite(RCLK_Pin, LOW);
for(int i = numOfRegisterPins - 1; i >= 0; i--){
digitalWrite(SRCLK_Pin, LOW);
int val = registers[i];
digitalWrite(SER_Pin, val);
digitalWrite(SRCLK_Pin, HIGH);
}
digitalWrite(RCLK_Pin, HIGH);
}
//set an individual pin HIGH or LOW
void setRegisterPin(int index, int value){
registers[index] = value;
}
I’m verrry proud of the progress thus far. As for next steps, I need to lock down the vehicle circuit into a soldered perf-board, and I need to come up with a better power solution for the controller. Thanks for reading!
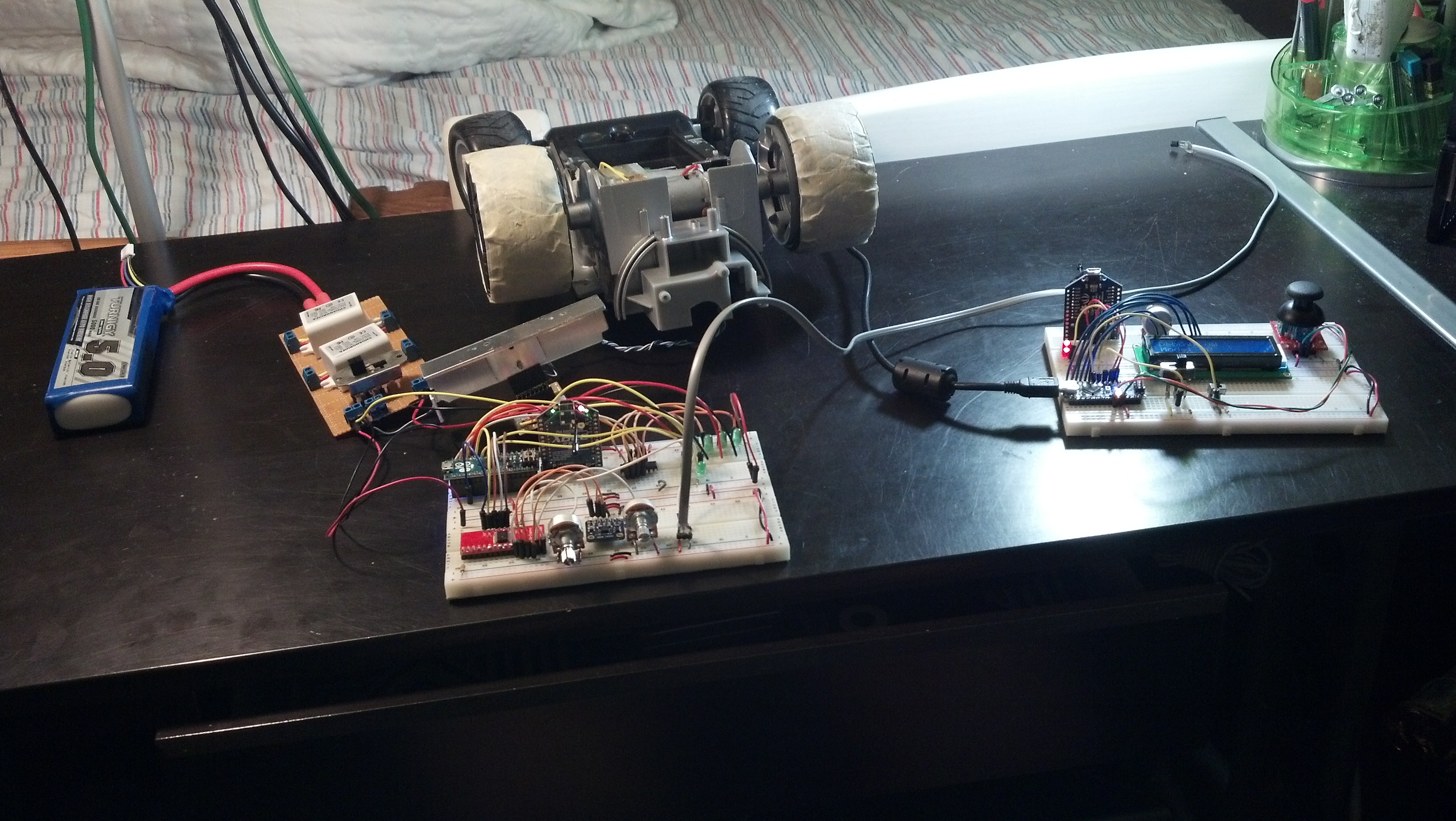
Okay this post is going to be pretty media heavy, here’s a video of the overview of the system:
There are 4 main systems at work here, and like the video said I’ll be going over all of them.
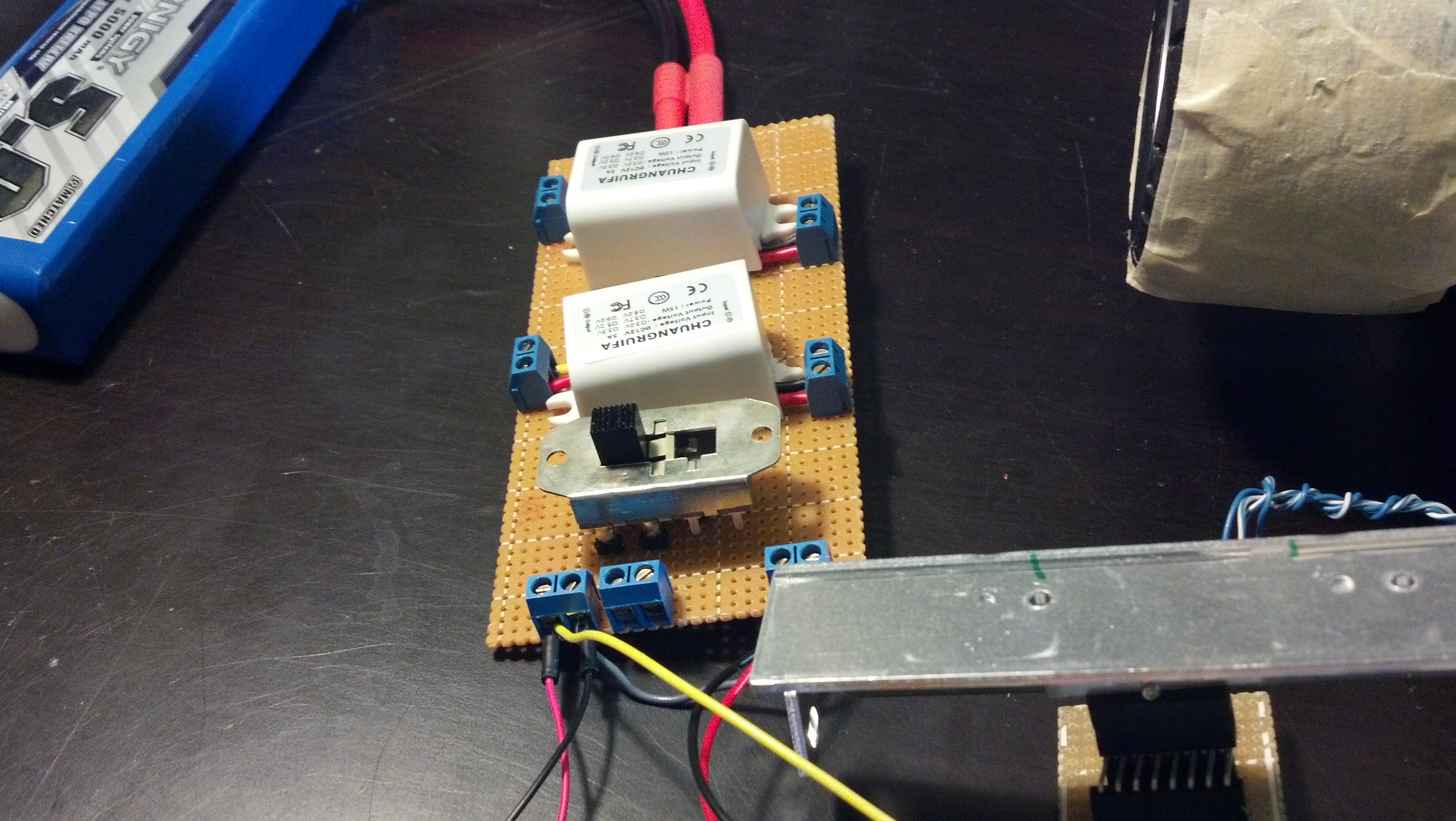
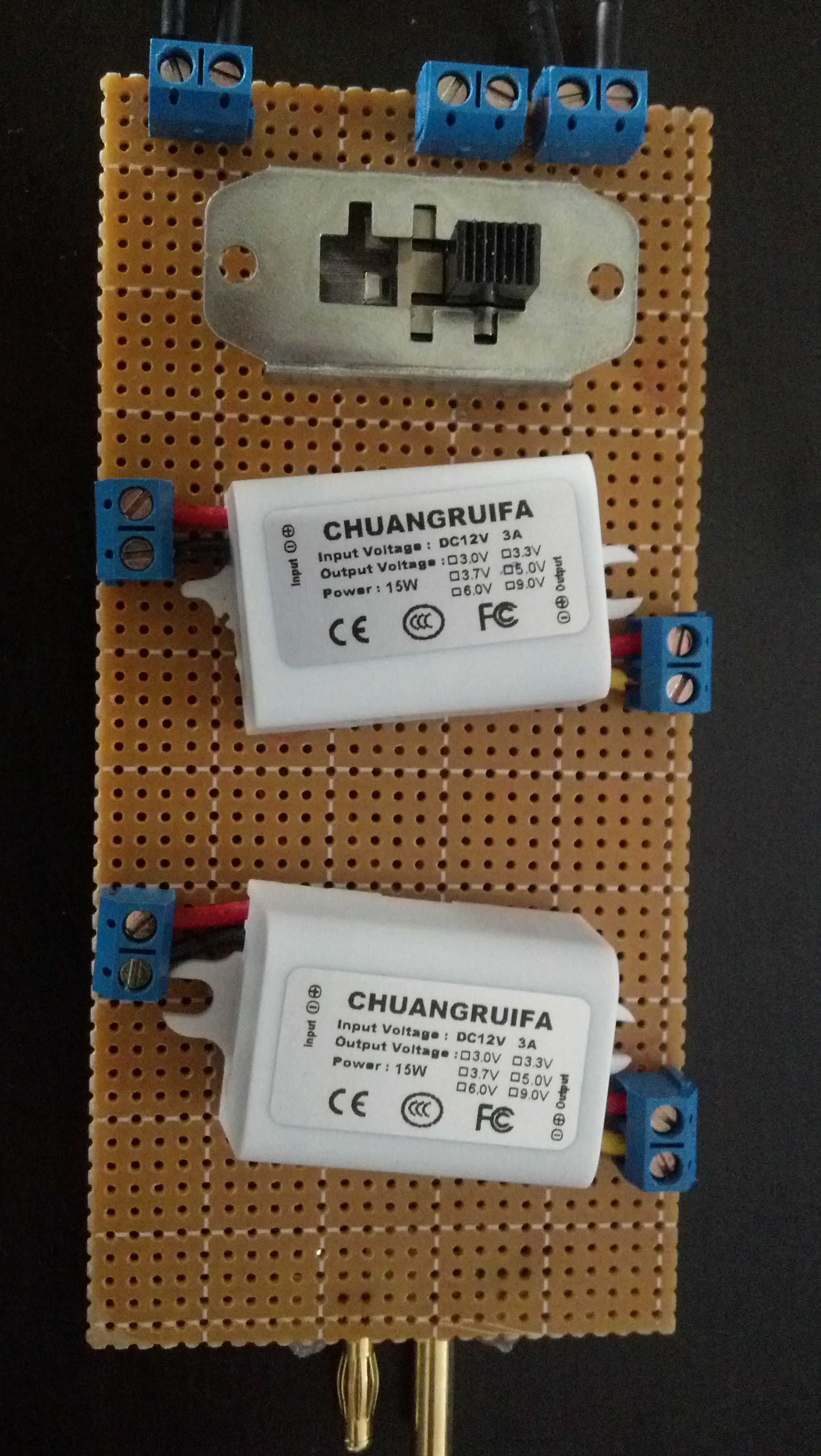
The first is the power system. At it’s core, it’s a Turnigy 5000mAh 3S 20C Lipo Battery Pack that is fed through two voltage converters. The first is 12v-9v@3A and the second is 12v-5v@3A. They are connected all via screw terminals in case they blow out. This all is fed through a large switch before it is fed into the controller and the motor driver, so it can all be cut off at a moments notice.
Here’s a video of me explaining that:
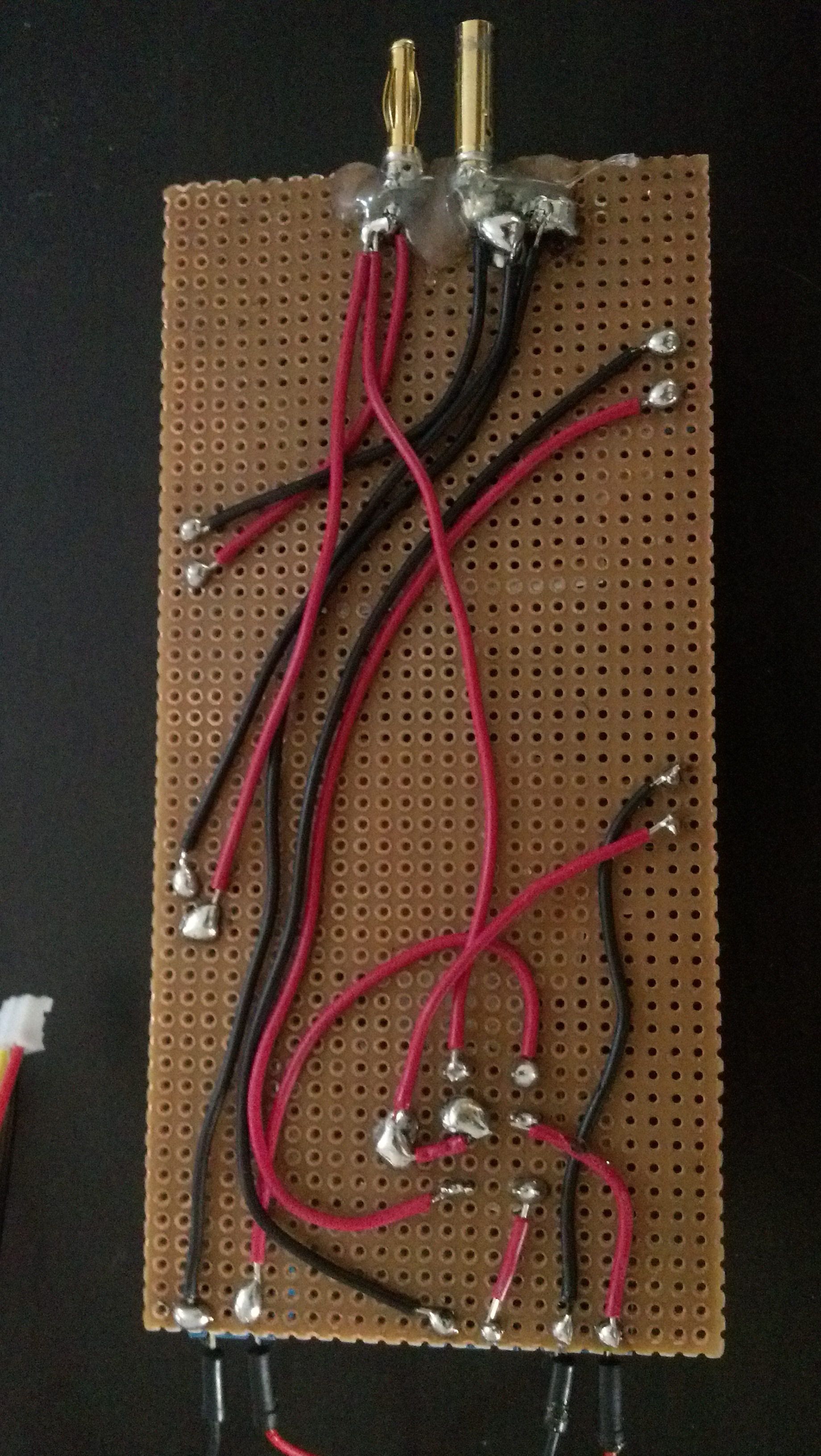
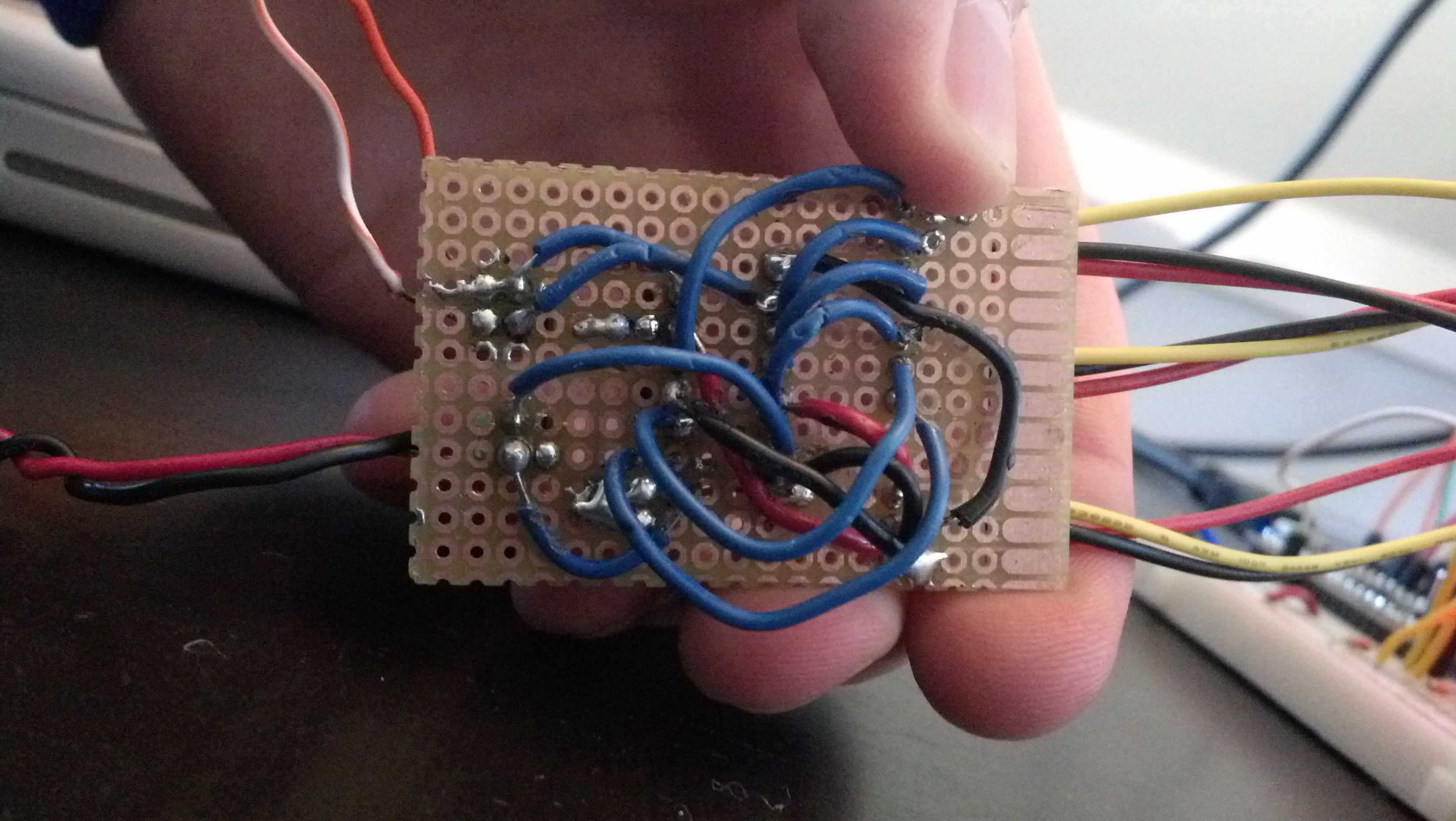
And here are some more detailed pictures:
This is the bottom, I’m still not great at going from breadboard to perfboard so bear with me.
And here’s the top without the 5v module installed, but it would be exactly the same as the 9v one that is:
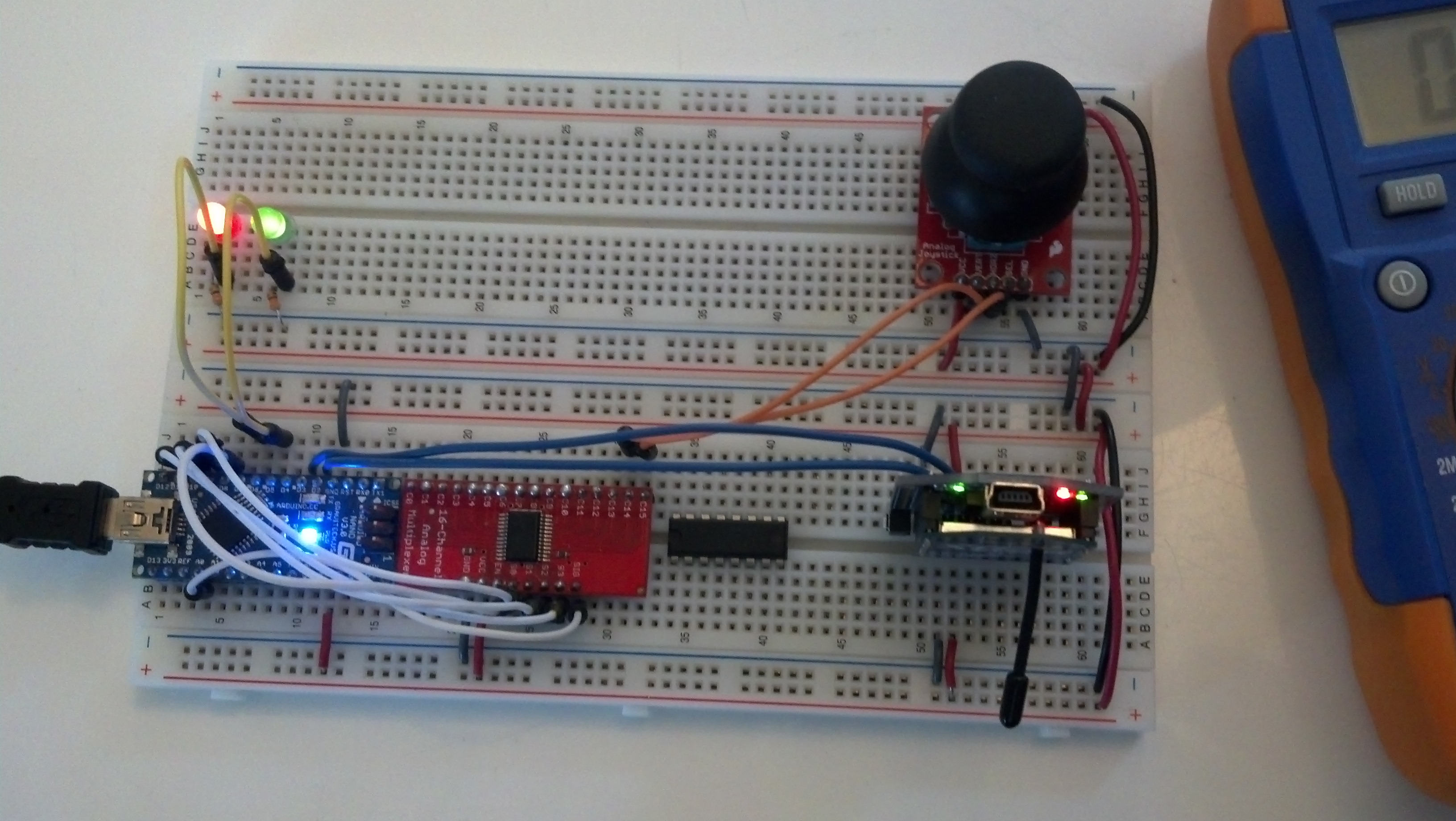
The last system is the controller. It’s an arduino micro hooked up to the same xbee system as seen earlier with a joystick and a multiplexer for more inputs. Here’s a video:
And some pictures:
So basically it receives and sends data to and from the controller as seen in the following code:
//Serial Handshake declaration
#include <string.h> // we'll need this for subString
#define MAX_STRING_LEN 20 // like 3 lines above, change as needed.
const char EOPmarker = '.'; //This is the end of packet marker
char serialbuf[32]; //This gives the incoming serial some room. Change it if you want a longer incoming.
//SoftwareSerial declaration
#include <SoftwareSerial.h>
SoftwareSerial xbee_serial(2, 3);
//Mux control pins declarations
int s0 = 8;
int s1 = 9;
int s2 = 10;
int s3 = 11;
int SIG_pin = 0;
//Shift Register Pins declaration
int SER_Pin = 5; //pin 14 on the 75HC595
int RCLK_Pin = 6; //pin 12 on the 75HC595
int SRCLK_Pin = 7; //pin 11 on the 75HC595
#define number_of_74hc595s 1 //How many of the shift registers - change this
#define numOfRegisterPins number_of_74hc595s * 8 //do not touch
boolean registers[numOfRegisterPins];
//Servo declarations
int left_servo_val;
int rght_servo_val;
//Misc Pin declaration
//inputs
int debug_switch1 = 4;
//outputs
int pot_LED = 5;
int fade_LED = 6;
int debug_switch1_LED = 2;
//Misc Integer Declarations
int joystick_x;
int joystick_y;
int brightness = 0; // how bright the LED is
int fadeAmount = 20; // how many points to fade the LED by
void setup(){
Serial.begin(9600);
xbee_serial.begin(9600);
//mux setup
pinMode(s0, OUTPUT);
pinMode(s1, OUTPUT);
pinMode(s2, OUTPUT);
pinMode(s3, OUTPUT);
digitalWrite(s0, LOW);
digitalWrite(s1, LOW);
digitalWrite(s2, LOW);
digitalWrite(s3, LOW);
//shift register setup
pinMode(SER_Pin, OUTPUT);
pinMode(RCLK_Pin, OUTPUT);
pinMode(SRCLK_Pin, OUTPUT);
pinMode(0, INPUT);
clearRegisters();
writeRegisters();
//Misc Pin Declarations
pinMode(pot_LED, OUTPUT);
xbee_serial.print("0,0,0."); // this is very important as it starts of the loop because it makes "xbee_serial.avalible() > 0.
}
void loop(){
if (xbee_serial.available() > 0) {
static int bufpos = 0;
char inchar = xbee_serial.read();
if (inchar != EOPmarker) {
serialbuf[bufpos] = inchar;
bufpos++;
}
else {
serialbuf[bufpos] = 0; //restart the buff
bufpos = 0; //restart the position of the buff
handshake();
}
}
}
void handshake(){
//input, recived from vehicle
//led1.
analogWrite(pot_LED, map(atoi(subStr(serialbuf, "," , 1)),0,1023,0,255));
analogWrite(fade_LED, atoi(subStr(serialbuf, "," , 2)));
brightness = brightness + fadeAmount;
// reverse the direction of the fading at the ends of the fade:
if (brightness == 0 || brightness == 255) {
fadeAmount = -fadeAmount ;
}
//output, sent to vehicle
//joystick1_ledval,joystick2_ledval,fade_LED.
analogRemap();
xbee_serial.print(joystick_x); // Value that it sends over the serial
xbee_serial.print(",");
xbee_serial.print(joystick_y); //This second byte is for the purpose of the program, it is not being used.
xbee_serial.print(",");
xbee_serial.print(brightness);
xbee_serial.print("."); //EOP marker
delay(10);
}
void debug_handshake(){
}
void analogRemap(){
joystick_x = readMux(15);
joystick_y = readMux(14);
}
char* subStr (char* input_string, char *separator, int segment_number) {
char *act, *sub, *ptr;
static char copy[MAX_STRING_LEN];
int i;
strcpy(copy, input_string);
for (i = 1, act = copy; i <= segment_number; i++, act = NULL) {
sub = strtok_r(act, separator, &ptr);
if (sub == NULL) break;
}
return sub;
}
int readMux(int channel){
int controlPin[] = {s0, s1, s2, s3};
int muxChannel[16][4]={
{0,0,0,0}, //channel 0
{1,0,0,0}, //channel 1
{0,1,0,0}, //channel 2
{1,1,0,0}, //channel 3
{0,0,1,0}, //channel 4
{1,0,1,0}, //channel 5
{0,1,1,0}, //channel 6
{1,1,1,0}, //channel 7
{0,0,0,1}, //channel 8
{1,0,0,1}, //channel 9
{0,1,0,1}, //channel 10
{1,1,0,1}, //channel 11
{0,0,1,1}, //channel 12
{1,0,1,1}, //channel 13
{0,1,1,1}, //channel 14
{1,1,1,1} //channel 15
};
//loop through the 4 sig
for(int i = 0; i < 4; i ++){
digitalWrite(controlPin[i], muxChannel[channel][i]);
}
//read the value at the SIG pin
int val = analogRead(SIG_pin);
//return the value
return val;
}
void clearRegisters(){
for(int i = numOfRegisterPins - 1; i >= 0; i--){
registers[i] = LOW;
}
}
void writeRegisters(){
digitalWrite(RCLK_Pin, LOW);
for(int i = numOfRegisterPins - 1; i >= 0; i--){
digitalWrite(SRCLK_Pin, LOW);
int val = registers[i];
digitalWrite(SER_Pin, val);
digitalWrite(SRCLK_Pin, HIGH);
}
digitalWrite(RCLK_Pin, HIGH);
}
//set an individual pin HIGH or LOW
void setRegisterPin(int index, int value){
registers[index] = value;
}
All of the parts listed in this video can be seen here which is the parts list.
That was a huge post! Thanks for reading and leave a comment if you have any questions.
Essentially, the adc reads an analog value and sends it to python. Python connects to a mysql database and adds the data to that. Once the user accesses the php script, a table, containing all of the values, is rendered.
First of all, you’ll need to make a mysql table with the correct specifications:
CREATE TABLE adc_input_data_10(Sample_Number INT NOT NULL AUTO_INCREMENT PRIMARY KEY, Time VARCHAR(100), Channel_1 VARCHAR(100), Channel_2 VARCHAR(100), Channel_3 VARCHAR(100) );
This creates a table that is found in the python script so it is very important that the TABLE values match as well as the column names.
Here’s that python script:
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import spidev
import time
import MySQLdb
import sys
import RPi.GPIO as GPIO
import datetime
now = datetime.datetime.now()
pin = 26
GPIO.setmode(GPIO.BOARD)
GPIO.setup(pin, GPIO.OUT)
con = MySQLdb.connect('localhost','adc_user','adc_user_pass','adc_database');
cursor = con.cursor()
spi = spidev.SpiDev()
spi.open(0, 0)
maxcyclenumber = 10
count = 0
def readadc(adcnum):
# read SPI data from MCP3008 chip, 8 possible adc's (0 thru 7)
if adcnum > 7 or adcnum < 0:
return -1
r = spi.xfer2([1, 8 + adcnum << 4, 0])
adcout = ((r[1] & 3) << 8) + r[2]
return adcout
for _ in range(maxcyclenumber):
cursor.execute("INSERT INTO adc_input_data_10(Time,Channel_1,Channel_2,Channel_3) VALUES(%s,'%s','%s','%s')",(datetime.datetime.now().strftime('%b-%d-%I%M%p-%G'),readadc(0),readadc(1),readadc(2)) )
con.commit() #this is important for live updating
count = count+1
print count
time.sleep (1)
if count == maxcyclenumber:
GPIO.cleanup()
con.close()</pre>
This reads the values from the adc (it is wired up as seen in this post)
Here’s the php, it reads the values from the adc_input_data_10 table on the adc_database.