
Pretty big day for me today. Here’s a video:
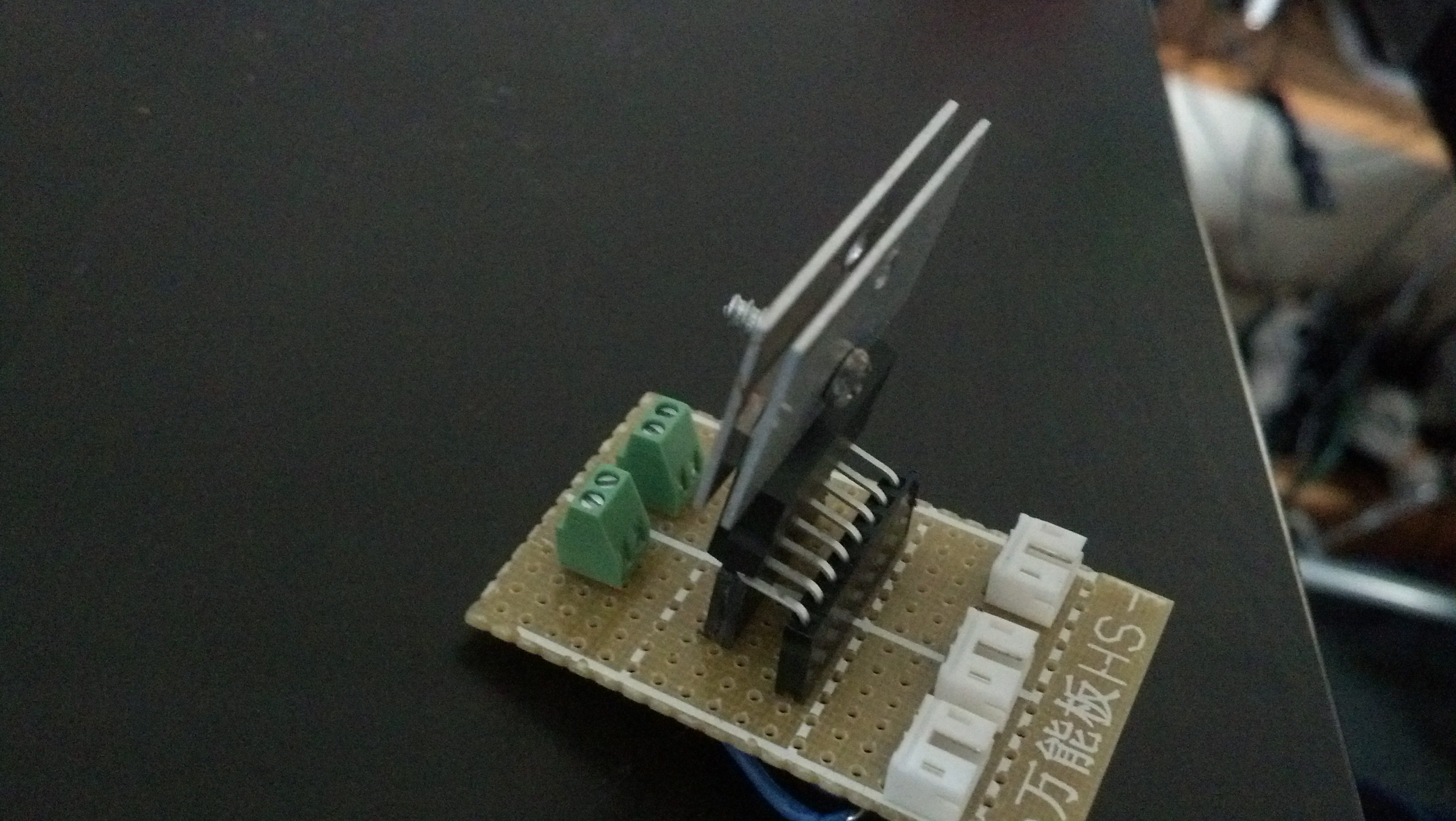
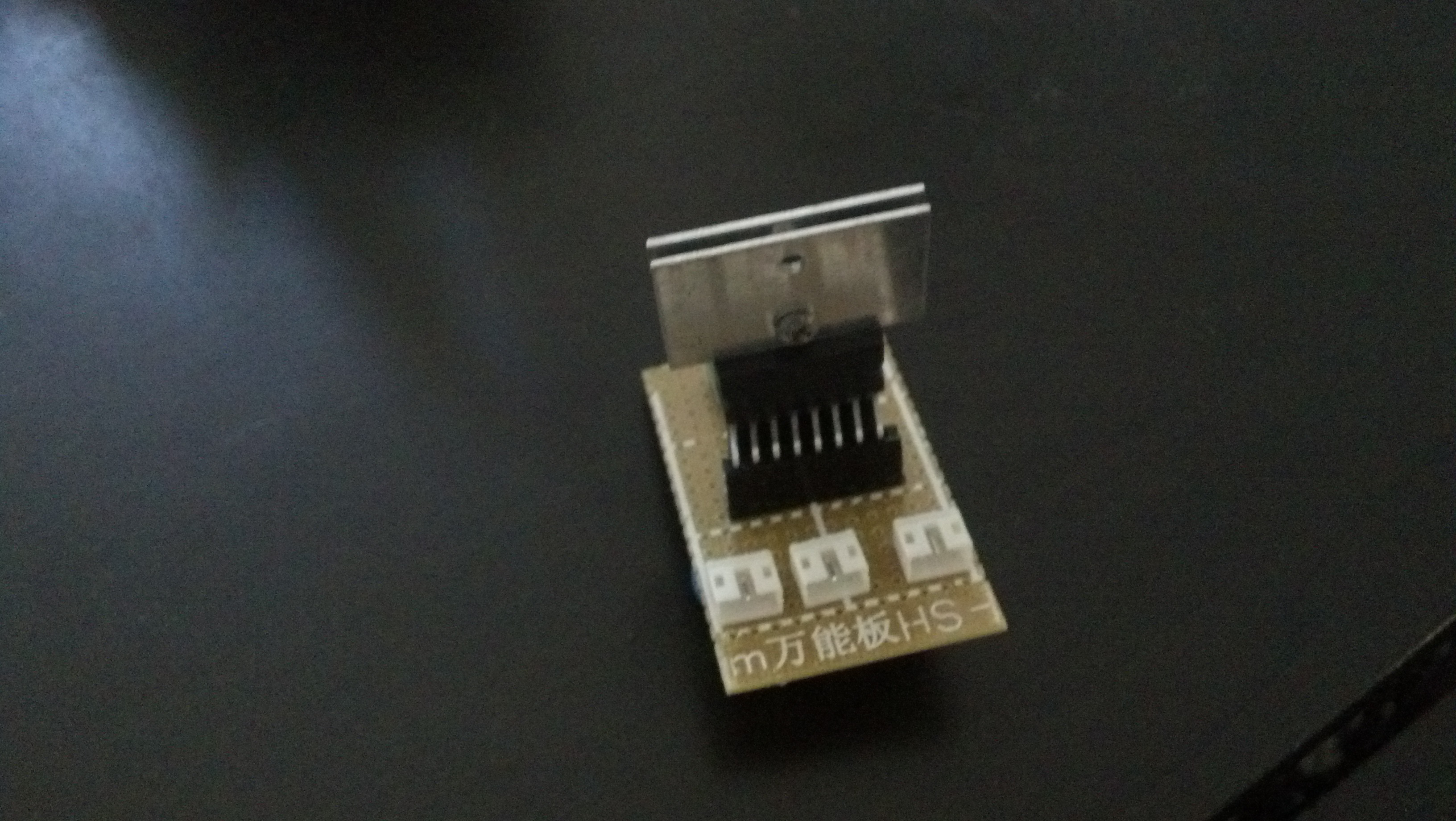
I’m pretty proud of this one, the only problem of this is that the l298N get’s too hot, you can see in the pictures that I’ve installed a makeshift heatsink but it still get’s really hot:
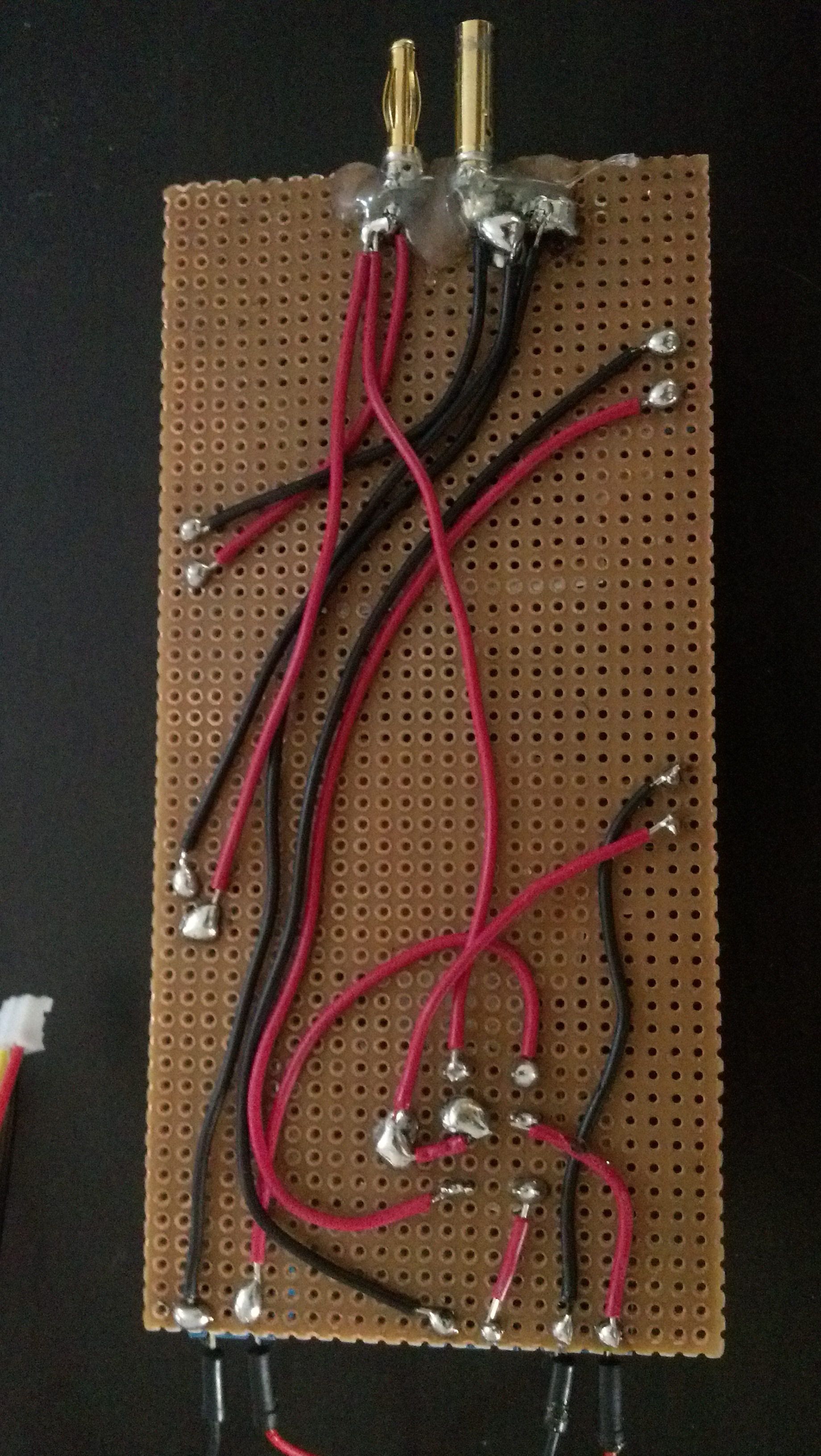
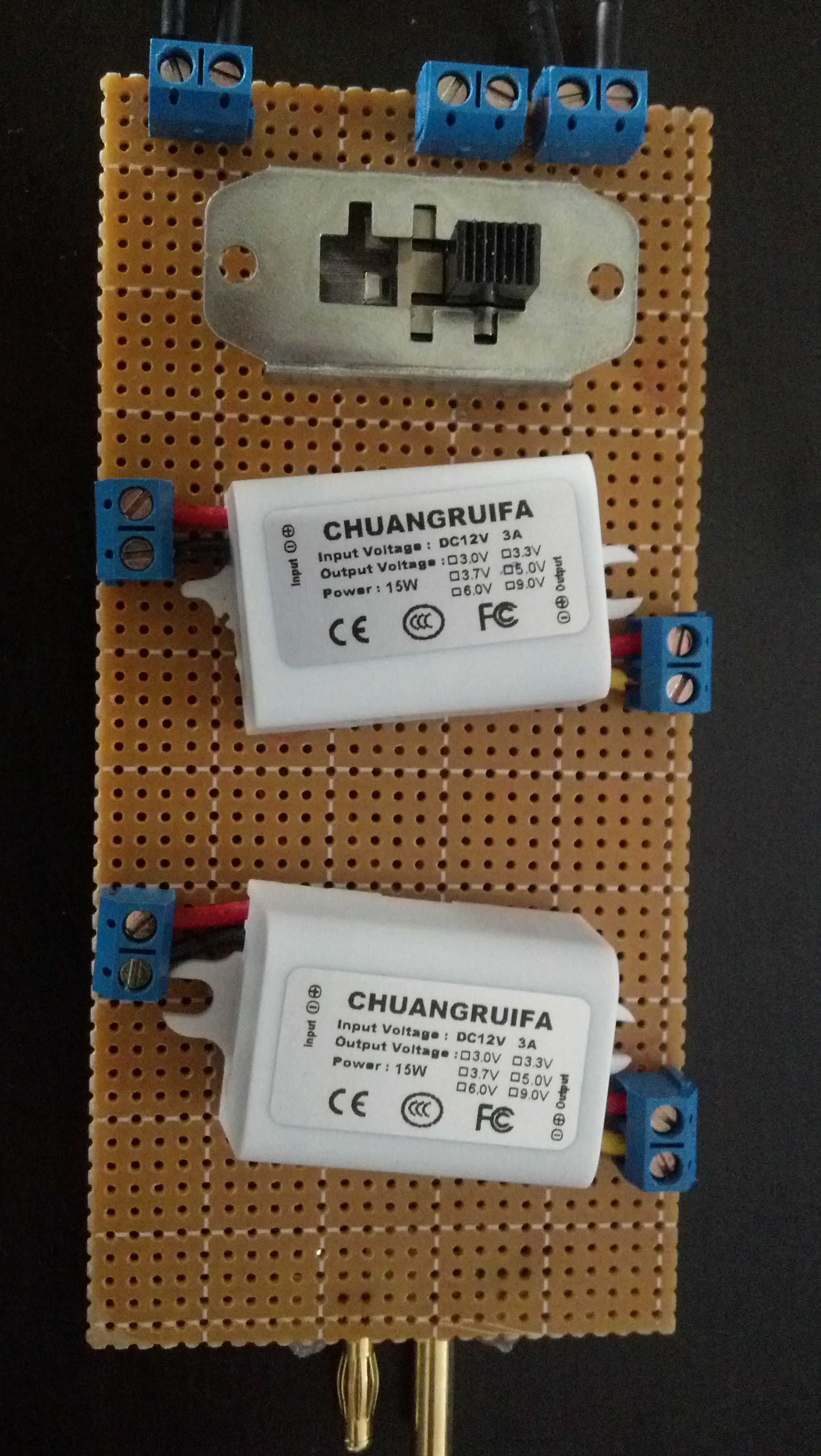
I also installed the 5v@3a regulator I mentioned in the last post, here are some pictures:
Here’s the vehicle code:
//Serial Handshake declaration
#include // we'll need this for subString
#define MAX_STRING_LEN 20 // like 3 lines above, change as needed.
const char EOPmarker = '.'; //This is the end of packet marker
char serialbuf[32]; //This gives the incoming serial some room. Change it if you want a longer incoming.
//SoftwareSerial declaration
#include
SoftwareSerial xbee_serial(8, 9);
//Shift Register Pins declaration
int SER_Pin = 10; //pin 14 on the 75HC595
int RCLK_Pin = 11; //pin 12 on the 75HC595
int SRCLK_Pin = 12; //pin 11 on the 75HC595
#define number_of_74hc595s 1 //How many of the shift registers - change this
#define numOfRegisterPins number_of_74hc595s * 8 //do not touch
boolean registers[numOfRegisterPins];
//Servo declarations
#include
Servo left_servo;
Servo rght_servo;
//Misc Pin declaration
//inputs
int pot = 1;
int debug_switch1 = 4;
//outputs
int fade_LED = 13;
int x_LED = 5;
int y_LED = 6;
//int debug_switch1_LED = 12;
//Misc Integer declarations
int brightness = 0; // how bright the LED is
int fadeAmount = 20; // how many points to fade the LED by
int x_upperTrigger = 600;
int x_lowerTrigger = 400;
int y_upperTrigger = 600;
int y_lowerTrigger = 400;
void setup(){
Serial.begin(9600);
xbee_serial.begin(9600);
pinMode(SER_Pin, OUTPUT);
pinMode(RCLK_Pin, OUTPUT);
pinMode(SRCLK_Pin, OUTPUT);
pinMode(0, INPUT);
clearRegisters();
writeRegisters();
pinMode(pot, INPUT);
pinMode(debug_switch1, INPUT);
pinMode(x_LED, OUTPUT);
pinMode(y_LED, OUTPUT);
pinMode(fade_LED, OUTPUT);
xbee_serial.print("0,0,0."); // this is very important as it starts of the loop because it makes "xbee_serial.avalible() > 0.
}
void loop(){
if (xbee_serial.available() > 0) {
static int bufpos = 0;
char inchar = xbee_serial.read();
if (inchar != EOPmarker) {
serialbuf[bufpos] = inchar;
bufpos++;
}
else {
serialbuf[bufpos] = 0; //restart the buff
bufpos = 0; //restart the position of the buff
handshake();
debug_handshake();
setRegisterPin(1, HIGH);
writeRegisters();
}
}
}
void handshake(){
//input, recived from controller
// led1val,ledval2,fade_LEDvalue.
//analogWrite(x_LED, map(atoi(subStr(serialbuf, "," , 1)),0,1023,0,255));
//analogWrite(y_LED, map(atoi(subStr(serialbuf, "," , 2)),0,1023,0,255));
analogWrite(fade_LED, atoi(subStr(serialbuf, "," , 3)));
brightness = brightness + fadeAmount;
// reverse the direction of the fading at the ends of the fade:
if (brightness == 0 || brightness == 255) {
fadeAmount = -fadeAmount ;
}
if (atoi(subStr(serialbuf, "," , 1)) > x_upperTrigger ){
analogWrite(x_LED, map(atoi(subStr(serialbuf, "," , 1)),512,1023,0,255));
setRegisterPin(2, HIGH);
setRegisterPin(3, LOW);
writeRegisters();
}
if (atoi(subStr(serialbuf, "," , 1)) < x_lowerTrigger ){
analogWrite(x_LED, map(atoi(subStr(serialbuf, "," , 1)),512,0,0,255));
setRegisterPin(2, LOW);
setRegisterPin(3, HIGH);
writeRegisters();
}
if (atoi(subStr(serialbuf, "," , 1)) > x_lowerTrigger && atoi(subStr(serialbuf, "," , 1)) < x_upperTrigger){
setRegisterPin(2, LOW);
setRegisterPin(3, LOW);
writeRegisters();
}
if (atoi(subStr(serialbuf, "," , 2)) > y_upperTrigger ){
analogWrite(y_LED, map(atoi(subStr(serialbuf, "," , 2)),512,1023,0,255));
setRegisterPin(4, HIGH);
setRegisterPin(5, LOW);
writeRegisters();
}
if (atoi(subStr(serialbuf, "," , 2)) < y_lowerTrigger ){
analogWrite(y_LED, map(atoi(subStr(serialbuf, "," , 2)),512,0,0,255));
setRegisterPin(4, LOW);
setRegisterPin(5, HIGH);
writeRegisters();
}
if (atoi(subStr(serialbuf, "," , 2)) > y_lowerTrigger && atoi(subStr(serialbuf, "," , 2)) < y_upperTrigger){
setRegisterPin(4, LOW);
setRegisterPin(5, LOW);
writeRegisters();
}
//output, sent to controller
//ledpot1,fade_LEDval.
xbee_serial.print(analogRead(pot));
xbee_serial.print(",");
xbee_serial.print(brightness); //This second byte is for the purpose of the program, it is not being used.
xbee_serial.print("."); //EOP marker
delay(10);
}
void debug_handshake(){
//input, recived from controller
Serial.print("VEHICLE DEBUG: ");
Serial.print("INPUTS|");
Serial.print(" x_LED: ");
Serial.print(map(atoi(subStr(serialbuf, "," , 1)),0,1023,0,255));
Serial.print(" y_LED: ");
Serial.print(map(atoi(subStr(serialbuf, "," , 2)),0,1023,0,255));
Serial.print(" in fade_LED: ");
Serial.print(atoi(subStr(serialbuf, "," , 3)));
//output, sent to controller
Serial.print(" OUTPUTS|");
Serial.print(" Pot 1: ");
Serial.print(analogRead(pot));
Serial.print(" out fade_LED: ");
Serial.print(brightness);
Serial.println("");
}
char* subStr (char* input_string, char *separator, int segment_number) {
char *act, *sub, *ptr;
static char copy[MAX_STRING_LEN];
int i;
strcpy(copy, input_string);
for (i = 1, act = copy; i <= segment_number; i++, act = NULL) {
sub = strtok_r(act, separator, &ptr);
if (sub == NULL) break;
}
return sub;
}
void clearRegisters(){
for(int i = numOfRegisterPins - 1; i >= 0; i--){
registers[i] = LOW;
}
}
void writeRegisters(){
digitalWrite(RCLK_Pin, LOW);
for(int i = numOfRegisterPins - 1; i >= 0; i--){
digitalWrite(SRCLK_Pin, LOW);
int val = registers[i];
digitalWrite(SER_Pin, val);
digitalWrite(SRCLK_Pin, HIGH);
}
digitalWrite(RCLK_Pin, HIGH);
}
//set an individual pin HIGH or LOW
void setRegisterPin(int index, int value){
registers[index] = value;
}
Here’s the controller code:
//Serial Handshake declaration
#include // we'll need this for subString
#define MAX_STRING_LEN 20 // like 3 lines above, change as needed.
const char EOPmarker = '.'; //This is the end of packet marker
char serialbuf[32]; //This gives the incoming serial some room. Change it if you want a longer incoming.
//SoftwareSerial declaration
#include
SoftwareSerial xbee_serial(2, 3);
//Mux control pins declarations
int s0 = 8;
int s1 = 9;
int s2 = 10;
int s3 = 11;
int SIG_pin = 0;
//Shift Register Pins declaration
int SER_Pin = 5; //pin 14 on the 75HC595
int RCLK_Pin = 6; //pin 12 on the 75HC595
int SRCLK_Pin = 7; //pin 11 on the 75HC595
#define number_of_74hc595s 1 //How many of the shift registers - change this
#define numOfRegisterPins number_of_74hc595s * 8 //do not touch
boolean registers[numOfRegisterPins];
//Servo declarations
int left_servo_val;
int rght_servo_val;
//Misc Pin declaration
//inputs
int debug_switch1 = 4;
//outputs
int pot_LED = 5;
int fade_LED = 6;
int debug_switch1_LED = 2;
//Misc Integer Declarations
int joystick_x;
int joystick_y;
int brightness = 0; // how bright the LED is
int fadeAmount = 20; // how many points to fade the LED by
void setup(){
Serial.begin(9600);
xbee_serial.begin(9600);
//mux setup
pinMode(s0, OUTPUT);
pinMode(s1, OUTPUT);
pinMode(s2, OUTPUT);
pinMode(s3, OUTPUT);
digitalWrite(s0, LOW);
digitalWrite(s1, LOW);
digitalWrite(s2, LOW);
digitalWrite(s3, LOW);
//shift register setup
pinMode(SER_Pin, OUTPUT);
pinMode(RCLK_Pin, OUTPUT);
pinMode(SRCLK_Pin, OUTPUT);
pinMode(0, INPUT);
clearRegisters();
writeRegisters();
//Misc Pin Declarations
pinMode(pot_LED, OUTPUT);
xbee_serial.print("0,0,0."); // this is very important as it starts of the loop because it makes "xbee_serial.avalible() > 0.
}
void loop(){
if (xbee_serial.available() > 0) {
static int bufpos = 0;
char inchar = xbee_serial.read();
if (inchar != EOPmarker) {
serialbuf[bufpos] = inchar;
bufpos++;
}
else {
serialbuf[bufpos] = 0; //restart the buff
bufpos = 0; //restart the position of the buff
handshake();
}
}
}
void handshake(){
//input, recived from vehicle
//led1.
analogWrite(pot_LED, map(atoi(subStr(serialbuf, "," , 1)),0,1023,0,255));
analogWrite(fade_LED, atoi(subStr(serialbuf, "," , 2)));
brightness = brightness + fadeAmount;
// reverse the direction of the fading at the ends of the fade:
if (brightness == 0 || brightness == 255) {
fadeAmount = -fadeAmount ;
}
//output, sent to vehicle
//joystick1_ledval,joystick2_ledval,fade_LED.
analogRemap();
xbee_serial.print(joystick_x); // Value that it sends over the serial
xbee_serial.print(",");
xbee_serial.print(joystick_y); //This second byte is for the purpose of the program, it is not being used.
xbee_serial.print(",");
xbee_serial.print(brightness);
xbee_serial.print("."); //EOP marker
delay(10);
}
void debug_handshake(){
}
void analogRemap(){
joystick_x = readMux(15);
joystick_y = readMux(14);
}
char* subStr (char* input_string, char *separator, int segment_number) {
char *act, *sub, *ptr;
static char copy[MAX_STRING_LEN];
int i;
strcpy(copy, input_string);
for (i = 1, act = copy; i <= segment_number; i++, act = NULL) {
sub = strtok_r(act, separator, &ptr);
if (sub == NULL) break;
}
return sub;
}
int readMux(int channel){
int controlPin[] = {s0, s1, s2, s3};
int muxChannel[16][4]={
{0,0,0,0}, //channel 0
{1,0,0,0}, //channel 1
{0,1,0,0}, //channel 2
{1,1,0,0}, //channel 3
{0,0,1,0}, //channel 4
{1,0,1,0}, //channel 5
{0,1,1,0}, //channel 6
{1,1,1,0}, //channel 7
{0,0,0,1}, //channel 8
{1,0,0,1}, //channel 9
{0,1,0,1}, //channel 10
{1,1,0,1}, //channel 11
{0,0,1,1}, //channel 12
{1,0,1,1}, //channel 13
{0,1,1,1}, //channel 14
{1,1,1,1} //channel 15
};
//loop through the 4 sig
for(int i = 0; i < 4; i ++){
digitalWrite(controlPin[i], muxChannel[channel][i]);
}
//read the value at the SIG pin
int val = analogRead(SIG_pin);
//return the value
return val;
}
void clearRegisters(){
for(int i = numOfRegisterPins - 1; i >= 0; i--){
registers[i] = LOW;
}
}
void writeRegisters(){
digitalWrite(RCLK_Pin, LOW);
for(int i = numOfRegisterPins - 1; i >= 0; i--){
digitalWrite(SRCLK_Pin, LOW);
int val = registers[i];
digitalWrite(SER_Pin, val);
digitalWrite(SRCLK_Pin, HIGH);
}
digitalWrite(RCLK_Pin, HIGH);
}
//set an individual pin HIGH or LOW
void setRegisterPin(int index, int value){
registers[index] = value;
}
I’m verrry proud of the progress thus far. As for next steps, I need to lock down the vehicle circuit into a soldered perf-board, and I need to come up with a better power solution for the controller. Thanks for reading!